Definição do dispositivo
Para alterar a definição de um dispositivo, selecione Definição do dispositivo na visualização Visão geral.
Quando você adiciona o módulo ao projeto pela primeira vez, a caixa de diálogo Definição do dispositivo mostra apenas a visualização Visão Geral com o canal 0 definido como Desabilitado por padrão. Dependendo do que você escolher para o parâmetro CHannel 0, você poderá ter parâmetros adicionais.
Se você definir o Canal 0 como Modbus mestre, você pode ver o Canal 0 - visualização Modbus mestre. Para obter mais informações, consulte Visualização Canal 0 – Modbus mestre.
Se você definir o Canal 0 na visualização Visão geral como Modbus secundário, você poderá ver a visualização Canal 0 - Modbus secundário. Para obter mais informações, consulte Visualização Canal 0 – Modbus secundário.
Visualização Visão geral
Use a visualização Visão geral na caixa de diálogo Definição do dispositivo para definir um dispositivo ou alterar a definição do dispositivo.
Caixa de diálogo Definição do dispositivo – Visualização Visão geral
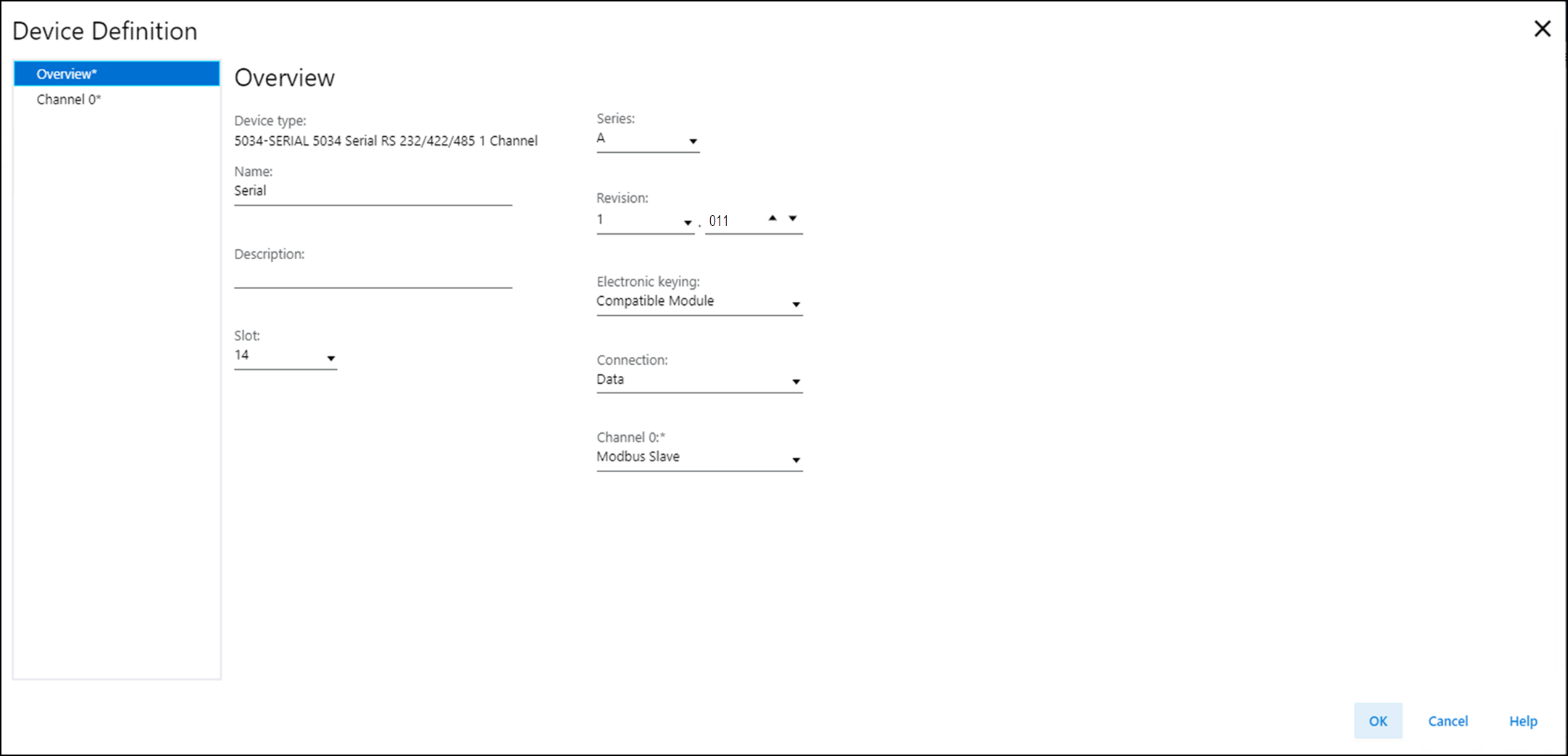
A visualização de visão geral inclui estes parâmetros:
Parâmetro | Definição | Opções disponíveis |
|---|---|---|
Tipo de dispositivo | Exibe o tipo e o código de catálogo do dispositivo. | Específico do dispositivo |
Nome | Insira um nome do dispositivo em conformidade com a IEC 61131. Se um caractere inválido for inserido neste campo, ou se o nome exceder 40 caracteres, o software ignora o caractere. | Todos os valores válidos |
Descrição | Insira a descrição do dispositivo. | Todos os valores válidos |
Slot | Especifique o número do slot em que o dispositivo reside. Somente slots entre 1 e o número máximo de dispositivos de E/S são válidos dependendo da plataforma Quando o dispositivo é criado, o número do slot assume como padrão a primeira posição de slot disponível. Quando o controlador é alterado para um que seja compatível com uma contagem máxima de E/S menor, o valor do slot atual pode não ser mais válido. | 1 a 32 |
Série | Especifica a série do dispositivo. | Específico do dispositivo |
Revisão | Especifica as revisões principais e secundárias do dispositivo. A faixa válida para a revisão secundária é de 1 a 255. | Específico do dispositivo |
Codificação eletrônica | Define a codificação eletrônica usada para o dispositivo. A codificação eletrônica compara o dispositivo definido no projeto com o dispositivo instalado. Se a codificação falhar, ocorre uma falha. Para obter informações detalhadas sobre a codificação eletrônica, consulte a Técnica de aplicação de codificação eletrônica em sistemas de controle Logix 5000, publicação LOGIX-AT001. |
ATENÇÃO:
Seja muito cuidadoso ao usar a opção Desabilitar
codificação; se usada incorretamente, esta opção
pode causar ferimentos pessoais ou morte, prejuízos
a propriedades, ou perda financeira. Recomendamos enfaticamente que você não use a opção Desabilitar codificação. Ao usar a opção Desabilitar codificação, você precisará assumir total responsabilidade por entender se o módulo que está sendo usado pode satisfazer as especificações funcionais da aplicação. |
Conexão | Especifique o tipo de dados transferidos entre o dispositivo e o controlador. | Dados (padrão) |
Canal 0 | Especifica o protocolo usado pelo canal para transmitir e receber dados de um dispositivo serial. |
Para obter mais informações, consulte Tabela 2. |
Modo de comunicação | Definição |
|---|---|
Desabilitado | O canal não é usado e nenhuma conexão física está habilitada entre o controlador e o módulo serial. |
ASCII genérico | Um modo geral de comunicação serial onde você pode definir quaisquer dados do usuário a serem transmitidos ou recebidos na comunicação. |
Modbus mestre | O dispositivo envia consultas do Modbus ou grava comandos nos dispositivos secundários conectados a ele. |
Modbus secundário | O dispositivo opera como secundário para um mestre externo e aguarda comandos do mestre. |
Visualização Canal 0 – Modbus mestre
A visualização Modbus mestre permite definir o dispositivo Modbus mestre.
Exemplo de visualização Canal 0 – Modbus mestre
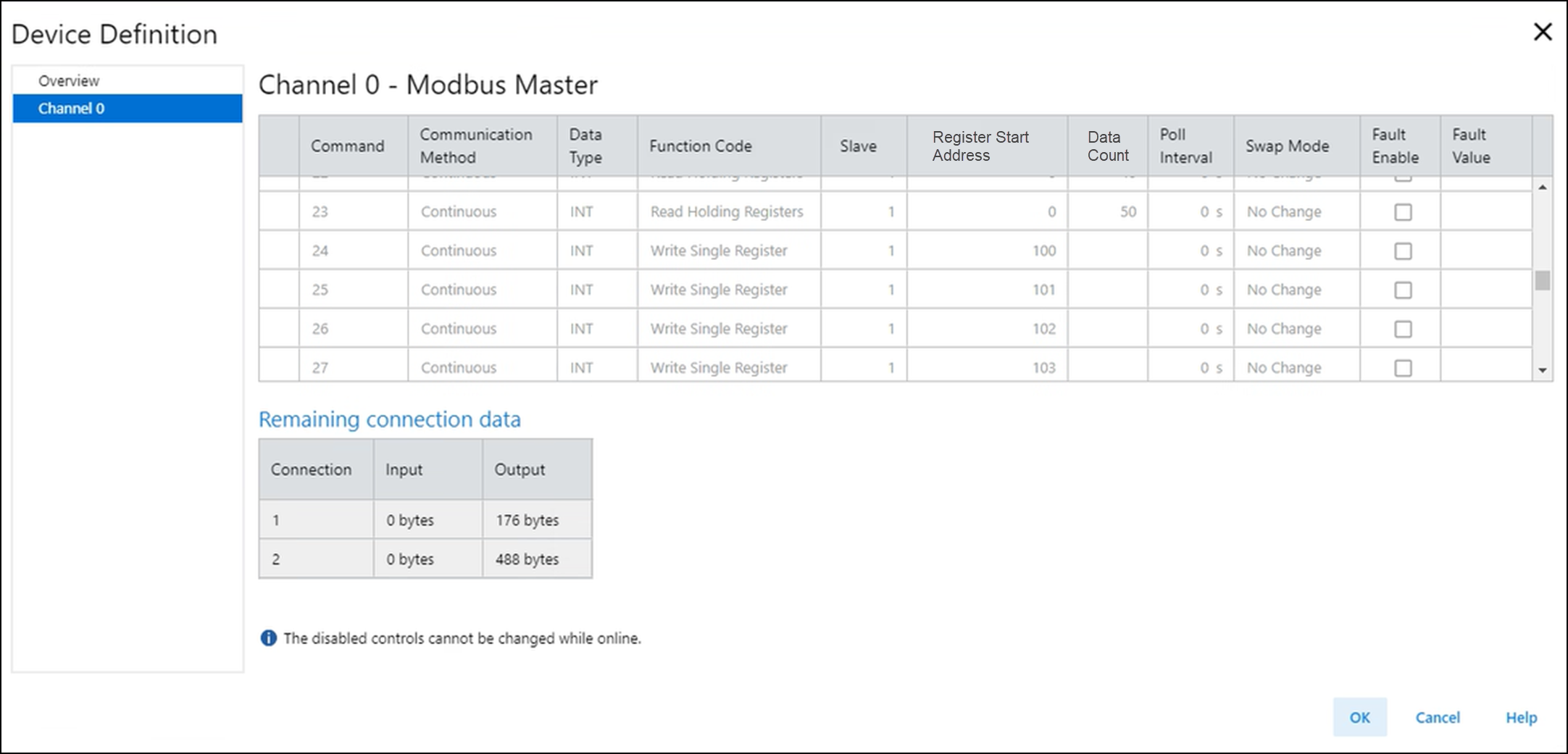
A visualização Modbus mestre inclui os seguintes parâmetros:
Parâmetro | Definição | Opções disponíveis | ||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
Comando | Exibe o índice do comando que está sendo configurado. | 0 a 49 | ||||||||||||||||||
Método de comunicação | Especifica o método de comunicação para o comando.
DICA:
Os parâmetros ficam indisponíveis quando o método de comunicação está desabilitado.
|
| ||||||||||||||||||
Tipo de dados | Especifica o tipo de dados para o comando. |
| ||||||||||||||||||
Código de função | Especifica a função do comando. Consulte Tabela 4 para obter a descrição de cada opção de código de função. | Especifica a função do comando. Os valores válidos dependem do tipo de dados. Se o tipo de dados for BOOL:
Se o tipo de dados for INT:
Se o tipo de dados for REAL:
| ||||||||||||||||||
Secundário | Especifica o endereço do nó do dispositivo Modbus secundário. | Os endereços válidos de um dispositivo Modbus secundário específico são 1 a 247. Para o comando de transmissão, defina o secundário como 0. O comando de transmissão pode ser somente comandos de gravação. | ||||||||||||||||||
Registrar endereço de início | Especifica o endereço inicial dos registradores que estão sendo lidos ou gravados. | 0 a 65.535 | ||||||||||||||||||
Contagem de dados | Especifica a quantidade de dados do Tipo de Dados que será lida ou gravada. Se o tipo REAL for usado, cada dado utiliza 2 registradores. O número de registradores consecutivos lidos/gravados é o seguinte:
O endereço final, resultante da quantidade de dados, não deve exceder o endereço máximo de 65.535. O endereço final é calculado como (Endereço inicial do registrador + Número de registradores – 1). | Os valores de comprimento de dados válidos dependem do tipo de dados e do código de função.
| ||||||||||||||||||
Intervalo de coleta de dados | Especifica o número de segundos entre cada vez que o comando é executado quando está no modo Contínuo. Por exemplo, se o Intervalo de Coleta de Dados for definido como 10, o Modbus mestre aguardará 10 segundos antes de executar o comando novamente. Quando o Intervalo de Coleta de Dados é definido como 0, o Modbus mestre repete a transmissão do comando o mais rápido possível.
DICA:
Este parâmetro não está disponível quando o método de comunicação é condicional.
| 0 a 32767 | ||||||||||||||||||
Modo de troca | Especifica a disposição de cada 4 bytes de dados recebidos ou transmitidos para o Modbus secundário. |
DICA:
A, B, C e D representam quatro bytes adjacentes nos dados recebidos/transmitidos.
| ||||||||||||||||||
Habilitação de falha | Determina se substituirá os dados recebidos por um valor de falha se o comando de leitura falhar. Marque a caixa de seleção para substituir os dados recebidos com o valor de falha.
DICA:
Esse parâmetro não está disponível quando o código de função é um comando de gravação.
| – | ||||||||||||||||||
Valor de falha | Especifica o valor para substituir os dados recebidos se o comando de leitura falhar. | – | ||||||||||||||||||
Conexão 1/Conexão 2 | A comunicação de comando usa a Conexão 1 por padrão. Se um tamanho de dados de comando exceder a quantidade restante de dados disponível para a Conexão 1, o comando usará a Conexão 2. | – | ||||||||||||||||||
Entrada | Mostra a quantidade de dados de leitura restante para essa conexão. | – | ||||||||||||||||||
Saída | Mostra a quantidade de dados de gravação restante para essa conexão. | – |
Tipo de dados | Código de função | Descrição |
|---|---|---|
BOOL | Ler bobinas (código de função 01) | Lê de 1 a 2000 status contíguos de bobinas em um dispositivo secundário. |
Ler entradas discretas (código de função 02) | Lê de 1 a 2000 status contíguos de entradas discretas em um dispositivo secundário. | |
Gravar bobina única (código de função 05) | Grava uma única saída como LIGADA ou DESLIGADA em um dispositivo secundário. | |
Gravar múltiplas bobinas (código de função 15) | Grava de 1 a 1968 saídas contíguas como LIGADAS ou DESLIGADAS em um dispositivo secundário. | |
INT | Leitura de registros de suporte (código de função 03) | Lê de 1 a 125 blocos contíguos de registradores de retenção INT em um dispositivo secundário. |
Leitura de registros de entrada (código de função 04) | Lê de 1 a 125 blocos contíguos de registradores de entrada INT em um dispositivo secundário. | |
Gravar registrador único (código de função 06) | Grava um único registrador de retenção em um dispositivo secundário. | |
Gravar múltiplos registradores (código de função 16) | Grava de 1 a 123 blocos contíguos de registradores de retenção INT em um dispositivo secundário. | |
REAL | Leitura de registros de suporte (código de função 03) | Lê de 1 a 62 blocos contíguos de registradores de retenção REAL em um dispositivo secundário. |
Leitura de registros de entrada (código de função 04) | Lê de 1 a 62 blocos contíguos de registradores de entrada REAL em um dispositivo secundário. | |
Gravar múltiplos registradores (código de função 16) | Grava de 1 a 61 blocos contíguos de registradores de retenção REAL em um dispositivo secundário. |
Limitações da lista de comandos mestre
As limitações da lista de comandos mestre são as seguintes:
- Podem ser criados no máximo 50 comandos. Os comandos estão sujeitos à memória de conexão disponível.
- Cada Modbus mestre suporta até duas conexões de dados.
- A conexão 1 é compatível com um máximo de 464 bytes de dados de leitura e 476 bytes de dados de gravação.
- A conexão 2 é compatível com um máximo de 472 bytes de dados de leitura e 488 bytes de dados de gravação.
- Cada comando usa:
- 2 bytes de dados de entrada por registrador de retenção ou registrador de entrada lido.
- 1 byte de dados de entrada para cada 1 a 8 bobinas ou entradas discretas lidas.
- 2 bytes de dados de saída por registrador de retenção gravado.
- 1 byte de dados de saída para cada 1 a 8 bobinas gravadas.
- Uma mensagem de erro é exibida quando a memória de conexão é excedida.
Uso de memória do comando mestre
Veja a seguir os exemplos de uso de memória do comando mestre:
- Configuração máxima de conexão única para registros:
- 223 palavras * 2 bytes/palavras lidos = 446 bytes de entrada
- 241 palavras * 2 bytes/palavras gravados = 482 bytes de saída

- Configuração máxima de conexão única para bobinas:
- 3576 bits / 8 bits/bytes lidos = 447 bytes de entrada
- 3856 bits / 8 bits/bytes gravados = 482 bytes de saída

Visualização Canal 0 – Modbus secundário
A visualização Modbus secundário permite definir o dispositivo Modbus secundário.
Exemplo de visualização Canal 0 – Modbus secundário
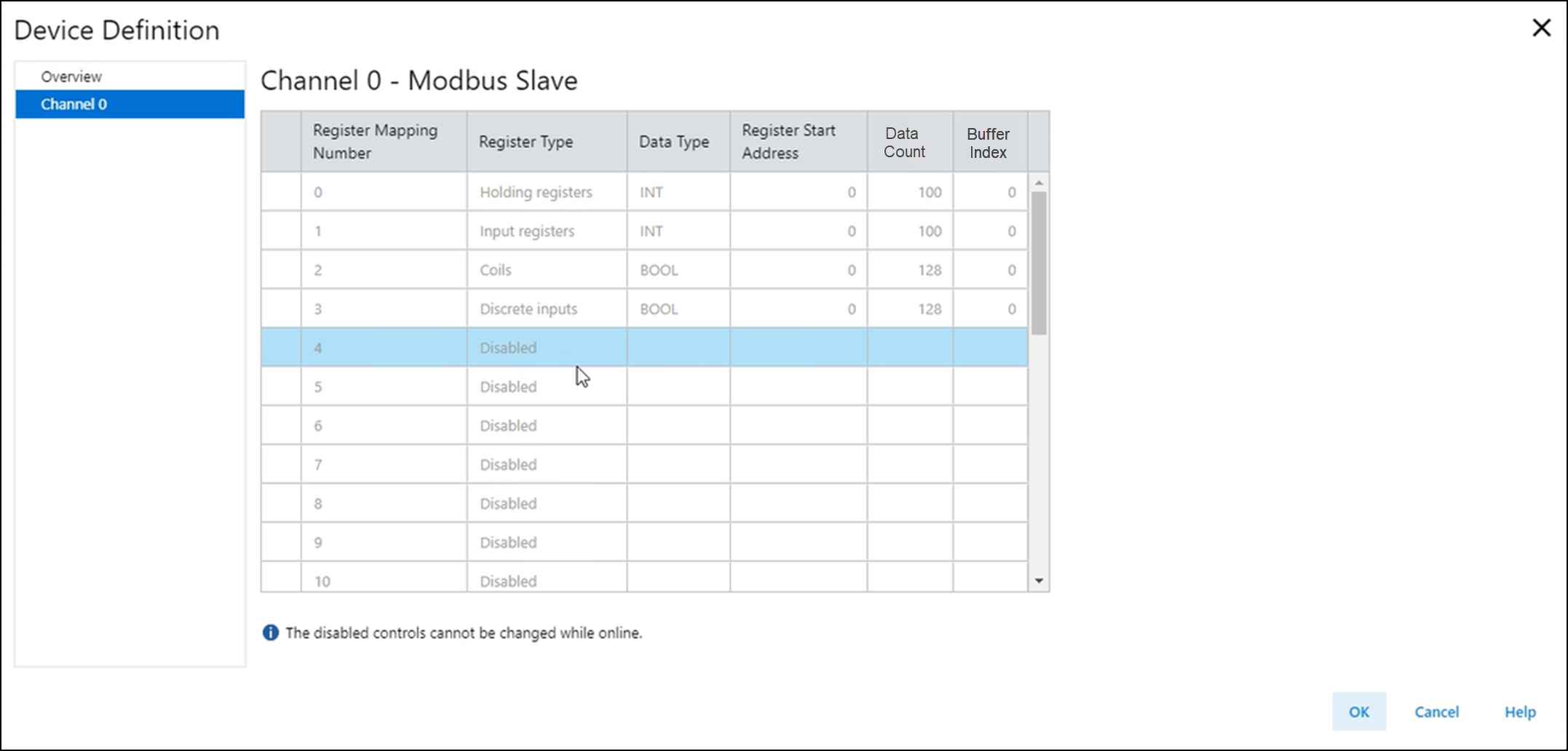
A visualização Modbus secundário inclui os seguintes parâmetros:
Parâmetro | Definição | Opções disponíveis |
|---|---|---|
Número de mapeamento do registrador | Exibe o número de mapeamento do registrador. | 0 a 29 |
Tipo de registro | Especifica o tipo de registrador.
DICA:
Os parâmetros ficam indisponíveis quando o tipo de registrador está desabilitado.
|
|
Tipo de dados | Especifica o tipo de dados para o registrador. | As opções disponíveis são baseadas no tipo de registrador que você escolher. Para bobinas e entradas discretas, a opção disponível é:
Para registradores de retenção e registradores de entrada, as opções disponíveis são:
|
Registrar endereço de início | Especifica o endereço inicial do registrador. | 0 a 65.535 |
Contagem de dados | Especifica o número de dados do tipo de dados. | Os valores válidos dependem do tipo de dados:
O número de registradores consecutivos lidos/gravados é o seguinte:
Dois mapeamentos com o mesmo tipo de registrador não podem ter intervalos de registradores sobrepostos. O intervalo de registradores para cada mapeamento vai do Endereço Inicial do Registrador até o endereço final do mapeamento. O endereço final é calculado como (Endereço inicial do registrador + Número de registradores – 1). O endereço final de cada mapeamento não deve exceder o endereço máximo de 65.535. |
Índice do buffer | Especifica o índice do buffer nos tags de entrada e/ou saída. Esses tags são: HoldingRegister[y], Coil[z], InputRegister[y] e DiscreteInput[z] em que “y” e “z” representam o índice do buffer. |
A quantidade de buffers consecutivos ocupados por este mapeamento é:
Para dois mapeamentos com o mesmo tipo de registrador, seus intervalos de buffer não podem se sobrepor. O intervalo de buffer abrange do Índice do buffer até o índice final do buffer determinado pela quantidade de dados. O índice do buffer final é calculado como (índice do buffer + número de buffers - 1). O índice do buffer final de cada mapeamento não deve exceder o intervalo válido do índice do buffer definido acima. |
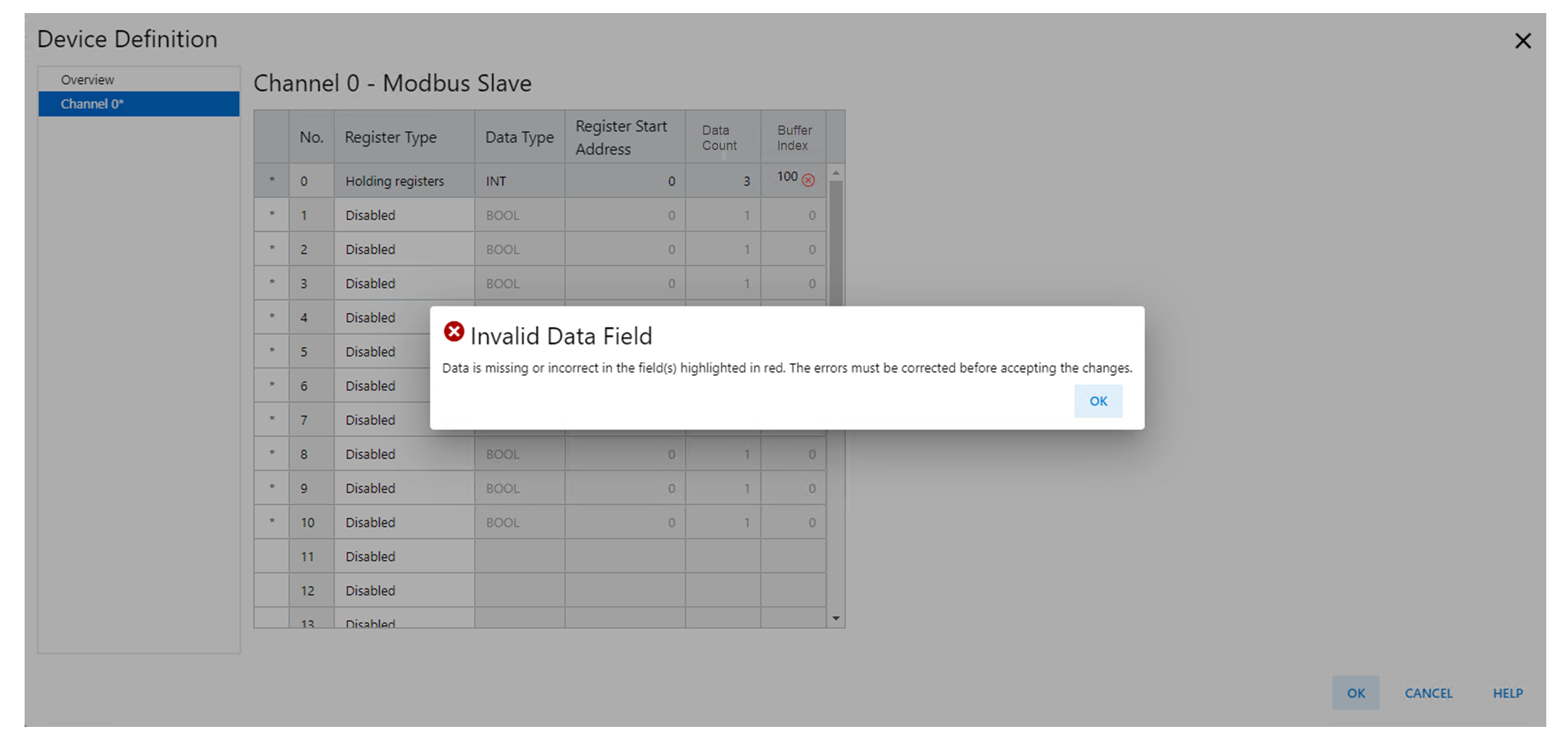
Exemplo de erro de índice do buffer
Limites da tabela de endereços do Modbus secundário
Podem ser criados até 30 intervalos de pontos de dados na tabela de endereços do módulo secundário, conforme a memória disponível:
- Máximo de 200 bytes para registradores de retenção (até 100 INTs ou 50 REALs)
- Máximo de 200 bytes para registradores de entrada (até 100 INTs ou 50 REALs)
- Até 128 bobinas (índices de dados de 0 a 15 em limites de 8 bits)
- Até 128 entradas discretas (índices de dados de 0 a 15 em limites de 8 bits)
Exemplo de mapeamento de dados do Modbus secundário
Exemplo de mapeamento de dados do Modbus secundário
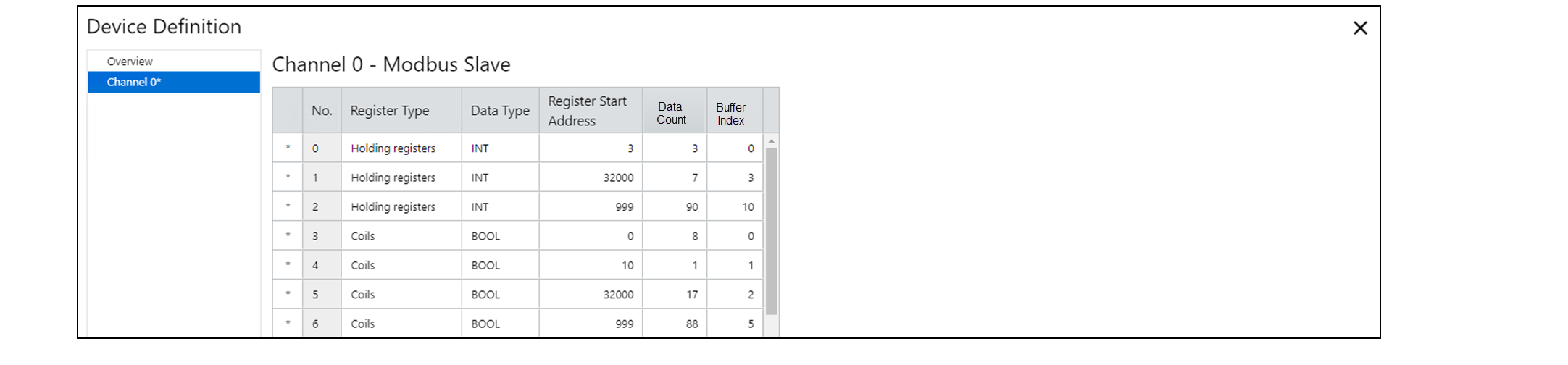
Os dados representados na Figura 5 podem ser interpretados a partir dos tags do módulo da seguinte forma:
- v:2:O1.Slave.HoldingRegister[0 a 2] = 400003 a 400005
- v:2:O1.Slave.HoldingRegister[3 a 9] = 432000 a 432006
- v:2:O1.Slave.HoldingRegister[10 a 99] = 400999 a 410088
- v:2:O1.Slave.Coil[0].0 a 0.7 = 000000 a 000007
- v:2:O1.Slave.Coil[1].0 = 000010
- v:2:O1.Slave.Coil[2].0 a [4].0 = 0320000 a 032016
- v:2:O1.Slave.Coil[5].0 a [15].7 = 000999 a 001086

Dê sua opinião