Definizione di un dispositivo
Per modificare la definizione di un dispositivo, selezionare Device Definition nella pagina Overview.
Quando si aggiunge il modulo al progetto per la prima volta, la finestra di dialogo Device Definition mostra solo la pagina Overview con il canale 0 impostato su Disabled per default. A seconda della scelta effettuata per il parametro Channel 0, si possono avere parametri aggiuntivi.
Se si imposta il canale 0 su Modbus Master, è possibile vedere la pagina Channel 0 – Modbus Master. Per ulteriori informazioni, consultare Pagina Channel 0 – Modbus Master.
Se si imposta Channel 0 nella pagina Overview su Modbus Slave, è possibile visualizzare la pagina Channel 0 – Modbus Slave. Per ulteriori informazioni, consultare Pagina Channel 0 – Modbus Slave.
Pagina Overview
Utilizzare la pagina Overview nella finestra di dialogo Device Definition per definire un dispositivo o modificare la definizione del dispositivo.
Finestra di dialogo Device Definition – Pagina Overview
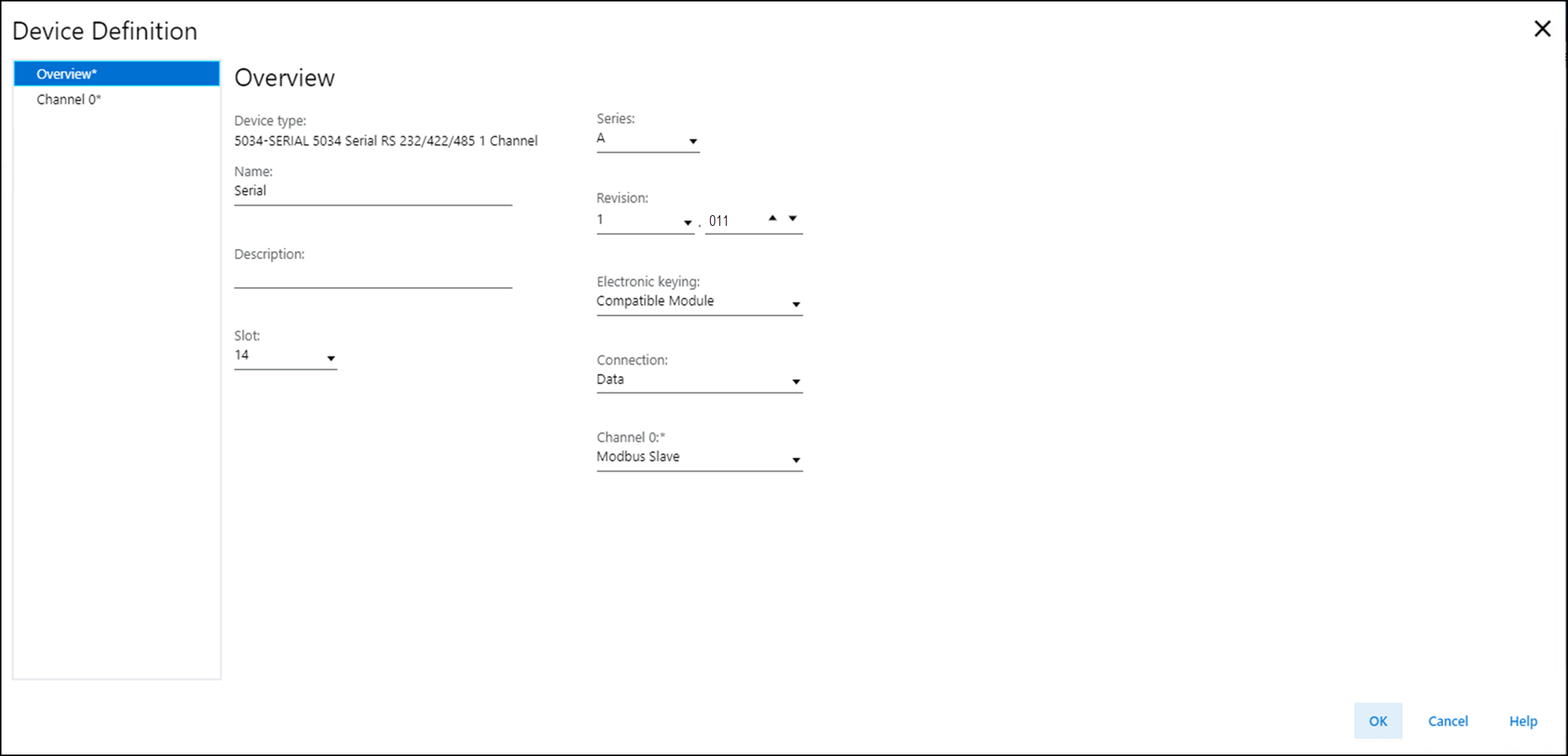
La pagina Overview include i seguenti parametri:
Parametro | Definizione | Opzioni disponibili |
|---|---|---|
Device Type | Visualizza il numero di catalogo e il tipo del dispositivo. | Specifiche del dispositivo |
Name | Immettere un nome di dispositivo conforme a IEC 61131. Se in questo campo viene inserito un carattere non valido o se il nome supera i 40 caratteri, il software ignora il carattere. | Tutti i valori validi |
Description | Inserire la descrizione del dispositivo. | Tutti i valori validi |
Slot | Specificare il numero di slot in cui risiede il dispositivo. A seconda della piattaforma, sono validi solo slot compresi tra 1 e il numero massimo di dispositivi I/O Quando viene creato il dispositivo, il numero di slot viene impostato di default sulla posizione del primo slot disponibile. Se il controllore viene sostituito con uno che supporta un numero massimo di I/O inferiore, il valore dello slot corrente potrebbe non essere più valido. | 1...32 |
Series | Specifica la serie del dispositivo. | Specifiche del dispositivo |
Revision | Specifica le versioni principale e secondaria del dispositivo. L’intervallo valido per la versione secondaria è compreso tra 1 e 255. | Specifiche del dispositivo |
Electronic Keying | Definisce la codifica elettronica utilizzata per il dispositivo. La codifica confronta il dispositivo definito nel progetto con il dispositivo installato. Se non c’è corrispondenza, viene generato un errore. Per informazioni più dettagliate sulla codifica elettronica, vedere Electronic Keying in Logix 5000 Control Systems Application Technique, pubblicazione LOGIX-AT001. |
ATTENZIONE:
Prestare estrema attenzione quando si decide di usare Disable Keying; se utilizzata erroneamente, questa opzione può creare situazioni in cui sussiste il rischio di lesioni personali, anche letali, danni alle cose o perdite economiche. Si consiglia vivamente di non utilizzare Disable Keying. Chi utilizza l'opzione Disable Keying dovrà assumersi la piena responsabilità di valutare se il dispositivo in uso sia in grado di soddisfare i requisiti funzionali dell'applicazione. |
Connection | Specificare il tipo di dati trasferiti tra il dispositivo e il controllore. | Data (default) |
Channel 0 | Specifica il protocollo utilizzato dal canale per trasmettere e ricevere dati da un dispositivo seriale. |
Per ulteriori informazioni, consultare Tabella 2. |
Modalità di comunicazione | Definizione |
|---|---|
Disabled | Il canale è inutilizzato e non è abilitato alcun collegamento fisico tra il controllore e il modulo seriale. |
Generic ASCII | Una modalità generale di comunicazione seriale in cui è possibile definire i dati utente da trasmettere o ricevere nella comunicazione. |
Modbus Master | Il dispositivo invia le query Modbus o i comandi di scrittura ai dispositivi slave ad esso collegati. |
Modbus Slave | Il dispositivo funziona come slave di un master esterno e attende i comandi del master. |
Pagina Channel 0 – Modbus Master
La pagina Modbus Master consente di definire il dispositivo Modbus Master.
Esempio di pagina Channel 0 – Modbus Master
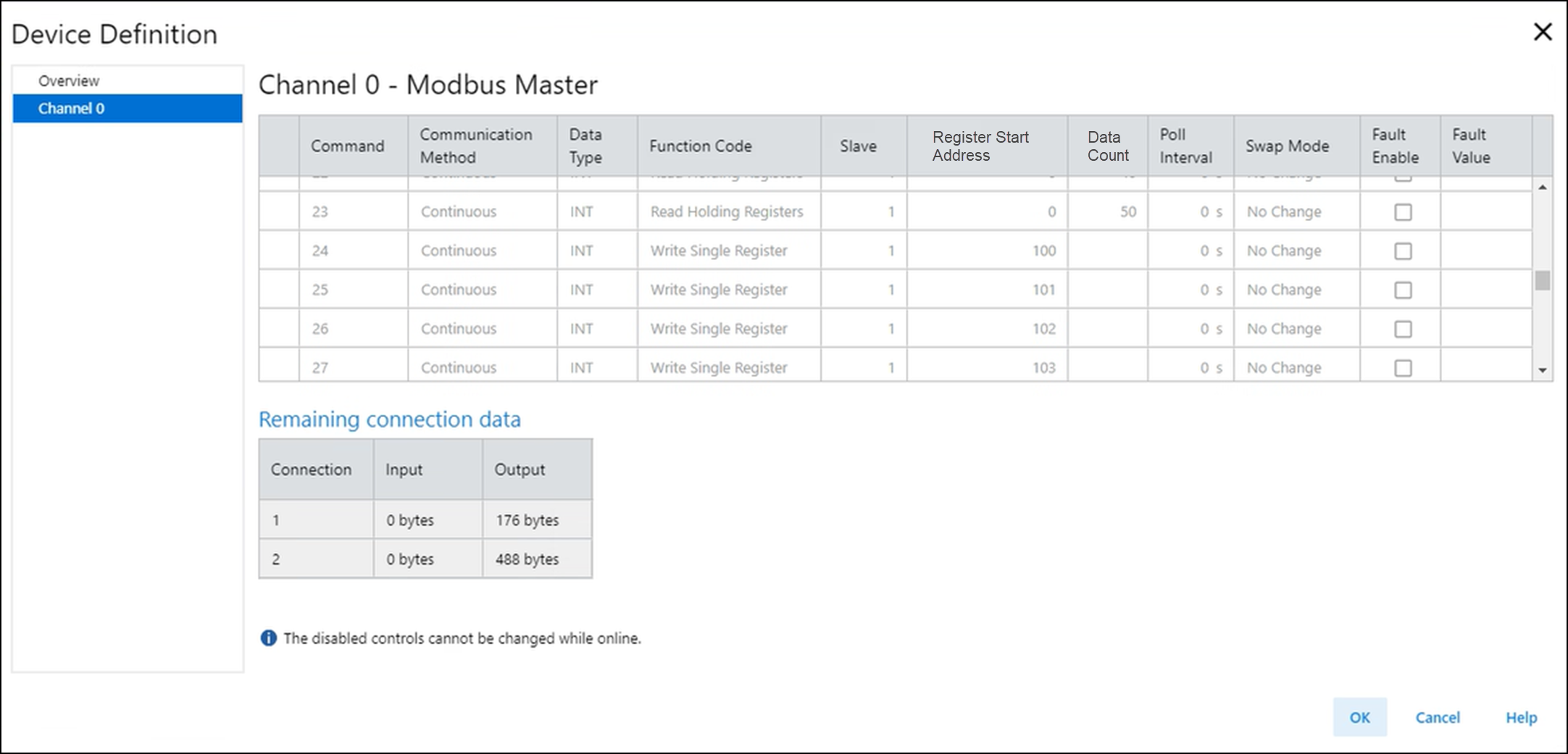
La pagina Modbus Master include i seguenti parametri:
Parametro | Definizione | Opzioni disponibili | ||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
Command | Visualizza l’indice del comando configurato. | 0...49 | ||||||||||||||||||
Communication Method | Specifica il metodo di comunicazione per il comando.
SUGGERIMENTO:
I parametri non sono disponibili quando il metodo di comunicazione è disabilitato.
|
| ||||||||||||||||||
Data Type | Specifica il tipo di dati per il comando. |
| ||||||||||||||||||
Function Code | Specifica la funzione del comando. Vedere Tabella 4 per la descrizione di ogni scelta del codice funzione. | Specifica la funzione del comando. I valori validi dipendono dal tipo di dati. Se il tipo di dati è BOOL:
Se il tipo di dati è INT:
Se il tipo di dati è REAL:
| ||||||||||||||||||
Slave | Specifica l’indirizzo di nodo del dispositivo Modbus Slave. | Gli indirizzi validi di uno specifico dispositivo Modbus Slave sono 1...247. Per il comando broadcast, impostare lo slave su 0. Il comando Broadcast può essere solo un comando di scrittura. | ||||||||||||||||||
Register Start Address | Specifica l’indirizzo iniziale dei registri letti o scritti. | 0...65.535 | ||||||||||||||||||
Data Count | Specifica il numero di dati del tipo di dati che viene letto o scritto. Se si utilizza REAL, ogni dato utilizza 2 registri. Il numero di registri consecutivi letti/scritti è il seguente:
L’indirizzo finale causato da Data Count non deve superare l’indirizzo massimo di 65.535. L’indirizzo finale viene calcolato come (Register Start Address + numero di registri - 1). | I valori validi per la lunghezza dei dati dipendono dal tipo di dati e dal codice funzione.
| ||||||||||||||||||
Poll Interval | Specifica il numero di secondi che intercorrono tra ogni esecuzione del comando quando è in modalità Continuous. Ad esempio, se Poll Interval è impostato su 10, Modbus Master attende 10 secondi prima di eseguire nuovamente il comando. Quando Poll Interval è impostato su 0, il Modbus Master ripete la trasmissione del comando il più velocemente possibile.
SUGGERIMENTO:
Questo parametro non è disponibile quando il metodo di comunicazione è Conditional.
| 0...32767 | ||||||||||||||||||
Swap Mode | Specifica la disposizione di ogni 4 byte di dati ricevuti da o trasmessi al Modbus Slave. |
SUGGERIMENTO:
A, B, C e D rappresentano quattro byte adiacenti nei dati ricevuti/trasmessi.
| ||||||||||||||||||
Fault Enable | Determina se sovrascrivere i dati ricevuti con un valore di errore se il comando di lettura non riesce. Selezionare la casella di controllo per sovrascrivere i dati ricevuti con il valore di errore.
SUGGERIMENTO:
Questo parametro non è disponibile quando il codice funzione è un comando di scrittura.
| – | ||||||||||||||||||
Fault Value | Specifica il valore per sostituire i dati ricevuti se il comando di lettura non riesce. | – | ||||||||||||||||||
Connection 1/Connection 2 | La comunicazione di comando utilizza la connessione 1 per impostazione predefinita. Se la dimensione dei dati di un comando supera la quantità di dati rimanenti disponibili per la connessione 1, il comando utilizza invece la connessione 2. | – | ||||||||||||||||||
Input | Mostra la quantità di dati letti rimanenti per quella connessione. | – | ||||||||||||||||||
Output | Mostra la quantità di dati di scrittura rimanenti per quella connessione. | – |
Tipo di dati | Codice funzione | Descrizione |
|---|---|---|
BOOL | Read Coils (Function Code 01) | Legge da 1 a 2000 stati contigui delle bobine in un dispositivo slave. |
Read Discrete Inputs (Function Code 02) | Legge lo stato contiguo 1…2000 degli ingressi discreti in un dispositivo slave. | |
Write Single Coil (Function Code 05) | Scrive una singola uscita su ON o OFF in un dispositivo slave. | |
Write Multiple Coils (Function Code 15) | Scrive l’uscita contigua 1…1968 su ON o OFF in un dispositivo slave. | |
INT | Read Holding Registers (Function Code 03) | Legge il blocco contiguo 1…125 di INT Holding Registers in un
dispositivo slave. |
Read Input Registers (Function Code 04) | Legge il blocco contiguo 1…125 di INT Input Registers in un
dispositivo slave. | |
Write Single Register (Function Code 06) | Scrive un singolo Holding Register in un dispositivo slave. | |
Write Multiple Registers (Function Code 16) | Legge il blocco contiguo 1…123 di INT Holding Registers in un dispositivo slave. | |
REAL | Read Holding Registers (Function Code 03) | Legge il blocco contiguo 1…62 di REAL Holding Registers in un
dispositivo slave. |
Read Input Registers (Function Code 04) | Legge il blocco contiguo 1…62 di REAL Input Registers in un
dispositivo slave. | |
Write Multiple Registers (Function Code 16) | Legge il blocco contiguo 1…61 di REAL Holding Registers in un dispositivo slave. |
Limitazioni della lista di comandi master
Le limitazioni della lista di comandi master sono:
- È possibile creare un massimo di 50 comandi. I comandi sono soggetti alla memoria di connessione disponibile.
- Ogni Modbus Master supporta fino a due connessioni dati.
- La connessione 1 supporta un massimo di 464 byte di dati di lettura e 476 byte di dati di scrittura.
- La connessione 2 supporta un massimo di 472 byte di dati di lettura e 488 byte di dati di scrittura.
- Ogni comando usa:
- 2 byte di dati di ingresso per ogni registro ritentivo o registro di ingresso letto.
- 1 byte di dati di ingresso ogni 1...8 bobine o ingressi discreti letti.
- 2 byte di dati di uscita per ogni registro ritentivo scritto.
- 1 byte di dati di uscita ogni 1...8 bobine scritte.
- Al superamento della memoria di connessione viene visualizzato un messaggio di errore.
Utilizzo di memoria dei comandi master
Di seguito sono riportati degli esempi di utilizzo della memoria dei comandi master.
- Configurazione massima di connessione singola per i registri:
- 223 parole * 2 byte/parola letta = 446 byte di ingresso
- 241 parole * 2 byte/parola scritta = 482 byte di uscita

- Configurazione massima di connessione singola per le bobine:
- 3576 bit / 8 bit/byte letti = 447 byte di ingresso
- 3856 bit / 8 bit/byte scritti = 482 byte di uscita

Pagina Channel 0 – Modbus Slave
La pagina Modbus Slave consente di definire il dispositivo Modbus Slave.
Esempio di pagina Channel 0 – Modbus Slave
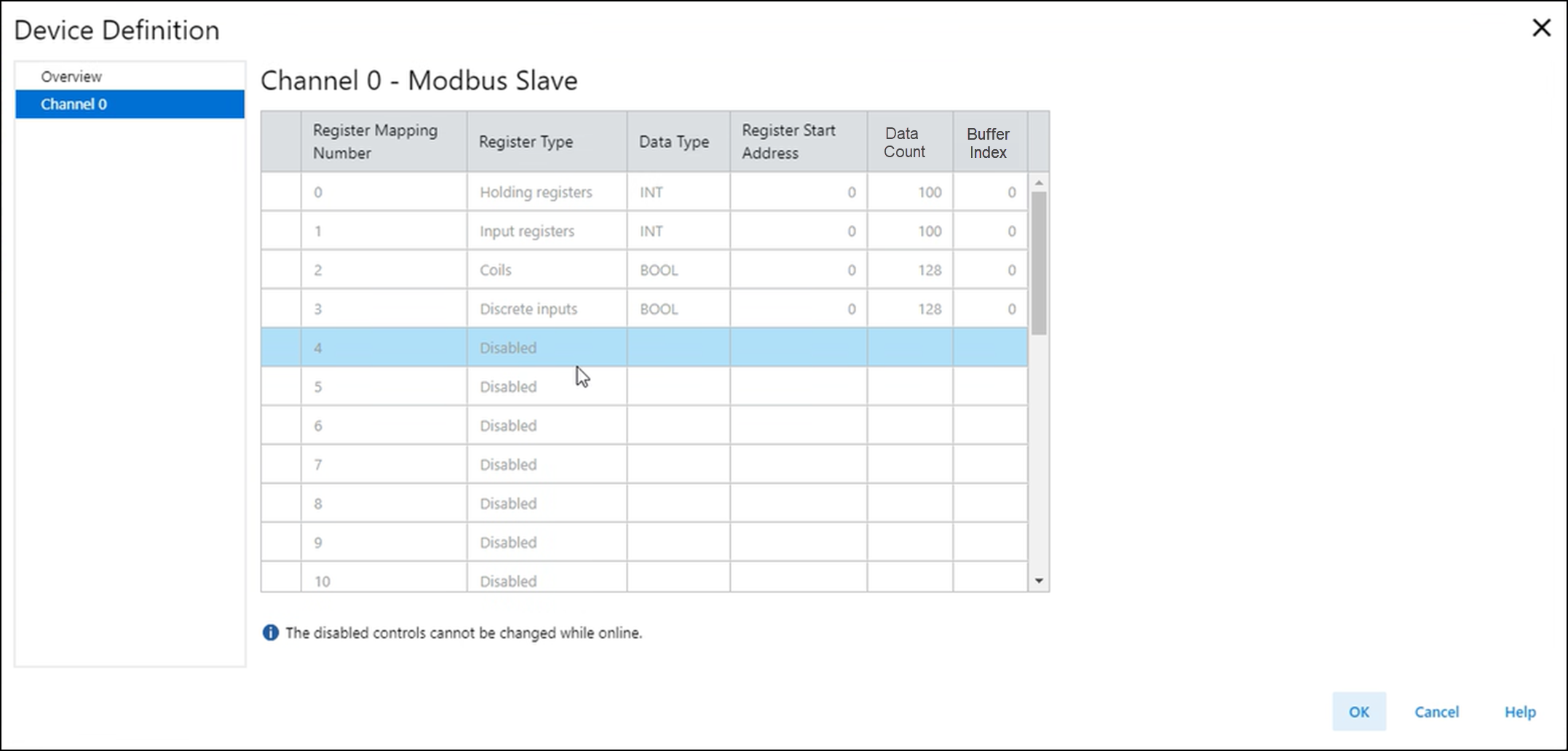
La pagina Modbus Slave include i seguenti parametri:
Parametro | Definizione | Opzioni disponibili |
|---|---|---|
Register Mapping Number | Visualizza il numero di mappatura del registro. | 0...29 |
Register Type | Specifica il tipo di registro.
SUGGERIMENTO:
I parametri non sono disponibili quando il tipo di registro è disabilitato.
|
|
Data Type | Specifica il tipo di dati per il registro. | Le opzioni disponibili dipendono dal tipo di registro scelto. Per Coils e Discrete Inputs, l’opzione disponibile è:
Per Holding Registers e Input Registers, le opzioni disponibili sono:
|
Register Start Address | Specifica l’indirizzo iniziale del registro. | 0...65.535 |
Data Count | Specifica il numero di dati del tipo di dati. | I valori validi dipendono dal tipo di dati:
Il numero di registri consecutivi letti/scritti è il seguente:
Per due mappature con lo stesso tipo di registro, i relativi
intervalli di registro non devono sovrapporsi. L’intervallo
di registro per ogni mappatura va dall’indirizzo iniziale
del registro (Register Start Address) all’indirizzo finale
della mappatura. L’indirizzo finale viene calcolato come
(Register Start Address + Numero di registri - 1). L’indirizzo finale di ogni mappatura non deve superare l’indirizzo massimo di 65.535. |
Buffer Index | Specifica l’indice del buffer dei buffer di registro nei tag di ingresso e/o uscita. Questi tag sono HoldingRegister[y], Coil[z], InputRegister[y] e DiscreteInput[z], dove “y” e “z” sono Buffer Index. |
Il numero di buffer consecutivi occupati da questa mappatura del registro è il seguente:
Per due mappature di registro con lo stesso tipo di registro,
i relativi intervalli di registro non devono sovrapporsi.
L’intervallo del buffer va dal Buffer Index all’indice del
buffer finale causato da Data Count. L’indice del buffer
finale viene calcolato come (Buffer Index + Numero di buffer
- 1). L’indice del buffer finale di ogni mappatura non deve superare l’intervallo valido di Buffer Index definito sopra. |
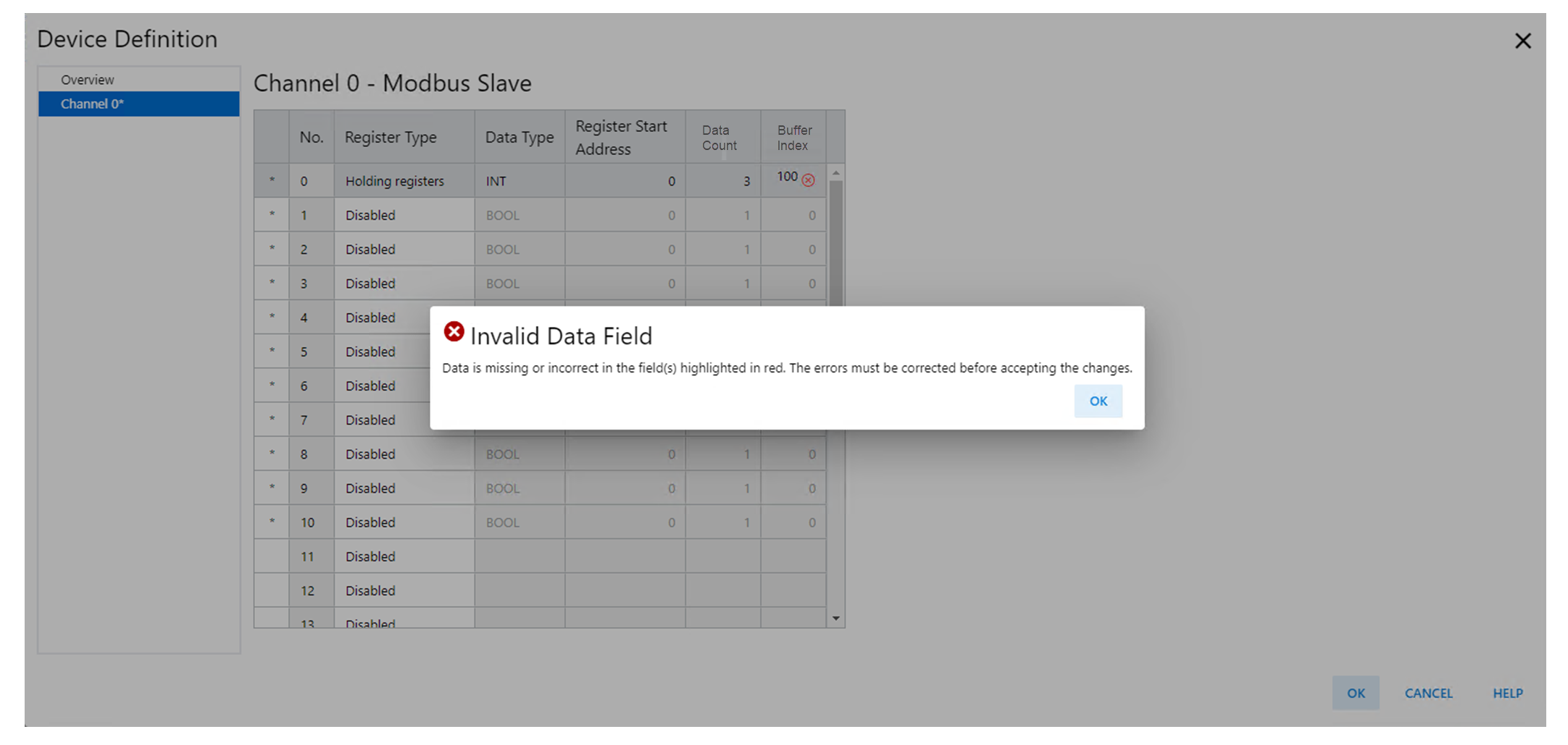
Esempio di errore dell’indice del buffer
Limiti della tabella di indirizzi Modbus Slave
Nella tabella degli indirizzi del modulo slave è possibile creare fino a 30 intervalli di punti dati, in base alla memoria disponibile:
- 200 byte massimo di Holding Registers (fino a 100 INT o 50 REAL)
- 200 byte massimo di Input Registers (fino a 100 INT o 50 REAL)
- Fino a 128 Coils (Data Index 0...15 a 8 bit)
- Fino a 128 Discrete Inputs (Data Index 0...15 a 8 bit)
Esempio di mappatura dati Modbus Slave
Esempio di mappatura dati Modbus Slave
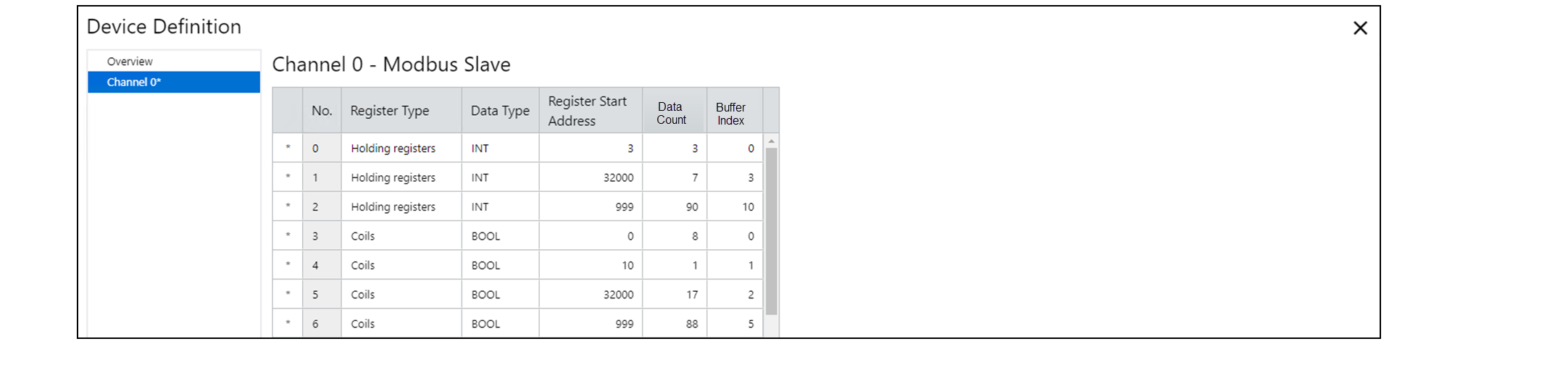
I dati rappresentati nella Figura 5 possono essere interpretati dai tag del modulo come segue:
- v:2:O1.Slave.HoldingRegister[0…2] = 400003…400005
- v:2:O1.Slave.HoldingRegister[3…9] = 432000…432006
- v:2:O1.Slave.HoldingRegister[10…99] = 400999…410088
- v:2:O1.Slave.Coil[0].0…0.7 = 000000…000007
- v:2:O1.Slave.Coil[1].0 = 000010
- v:2:O1.Slave.Coil[2].0…[4].0 = 0320000…032016
- v:2:O1.Slave.Coil[5].0…[15].7 = 000999…001086

Fornire un feedback