Configuración Práctica del Micro800 y del Kinetix 5100
Aplicación práctica de arranque control de movimiento con Kinetix 5100 y Micro800, funcional para cualquier tipo de industria que requiera soluciones sencillas de control de movimiento - [Tiempo de implementación: 60 minutos]
El objetivo principal de la aplicación es que los equipos de ingeniería de clientes, integradores, OEM, etc., puedan tener a disposición un programa de arranque para cualquier proyecto de control de movimiento que involucre Kinetix 5100, Micro 800 y Panel View 800.
Los archivos ejecutables para correr la aplicación de control de movimiento fueron diseñados en los entornos de software de Connected Components Workbench (para programación del Micro 800 y panel view 800) y KNX5100C (para configuración del drive Kinetix 5100), estos archivos incluyen el programa y la configuración necesaria para el controlar el Micro800, los parámetros para K5100 y el programa de la HMI.
¿Esto es útil para mí?
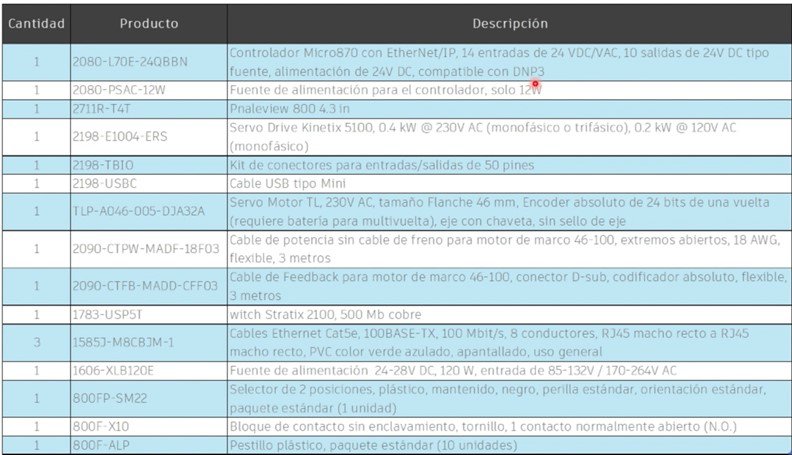
Esta Aplicación fue diseñada con un listado de materiales básicos de fácil acceso para los usuarios y con los cuales puede darse una ejecución sencilla. Adicionalmente, esta aplicación es completamente funcional para cualquier tipo de industria que requiera una solución sencilla de control de movimiento.
Todo lo anterior permite un gran número de ventajas como por ejemplo, crear una base común para proyectos futuros, luego de haber comprendido y trabajado con este tipo de aplicaciones, así como también reducir tiempos de desarrollo y puesta en marcha de nuevas aplicaciones para los equipos encargados de control y automatización de plantas, Integradores, OEM’s, puesto que también funcionara como herramienta práctica de capacitación técnica y de pruebas de concepto, al mismo tiempo que se mejora en compresión de conceptos relacionados a control de movimientos y temáticas afines.
Descargas
Tenga en cuenta: deberá aceptar los Términos y Condiciones para cada descarga.
Conocimiento básico de programación y configuración en el software Connected Components Workbench (CCW), así como experiencia en programación y uso de Micro800, PanelView 800 y Kinetix 5100, utilizando el software de configuración KNC5100C.
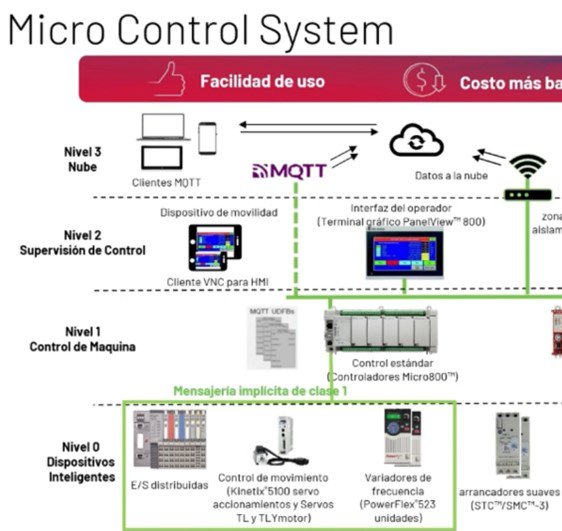
Comprensión del entorno del sistema de control Micro.
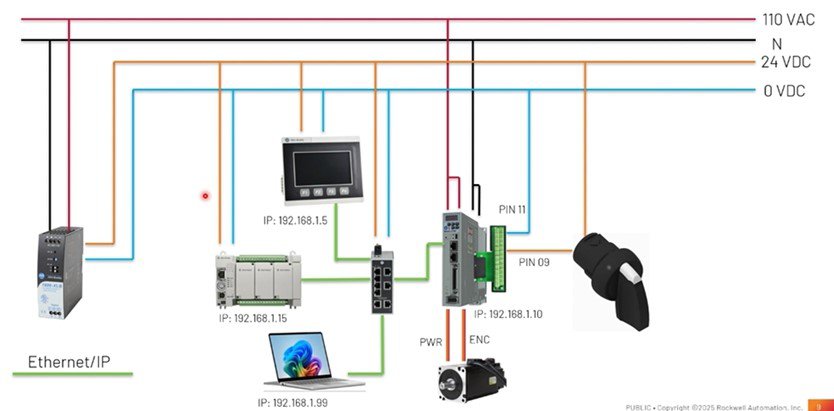
Esquema de arquitectura y conexiones para el uso de la aplicación.
Manuales/Notas Técnicas
Dentro de la carpeta que podrá descarga junto a los archivos de la aplicación podrá identificar 3 manuales que servirán para complementar la información de uso y entendimiento de los diferentes componentes y equipos de uso en esta aplicación. Estos son:
CCW: Uso de proyecto de la Sample Code Library;
Connected Components Workbench v21: UDFBs de mensajería implícita para Kinetix 5100 y variadores PowerFlex serie 520;
Controladores programables Micro830, Micro850 y Micro870
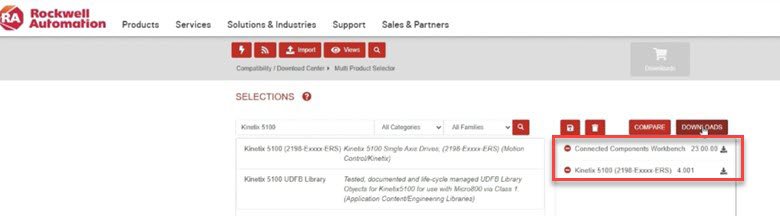
Paso 1: Descargar Software de diseño y configuración – CCW & KNC5100C
En la página de descargas de Rockwell Automation, podrán con los nombres ya mencionados de los softwares respectivos, buscar y descargar cada uno de ellos para instalarlos y tenerlos a disposición para las configuraciones respectivas.
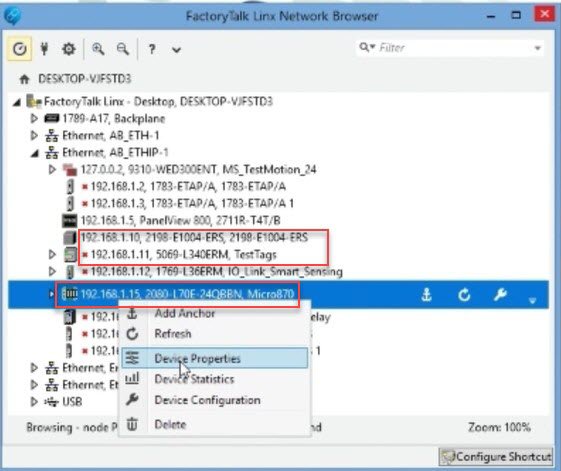
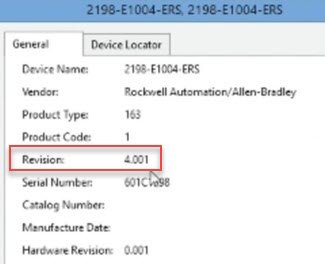
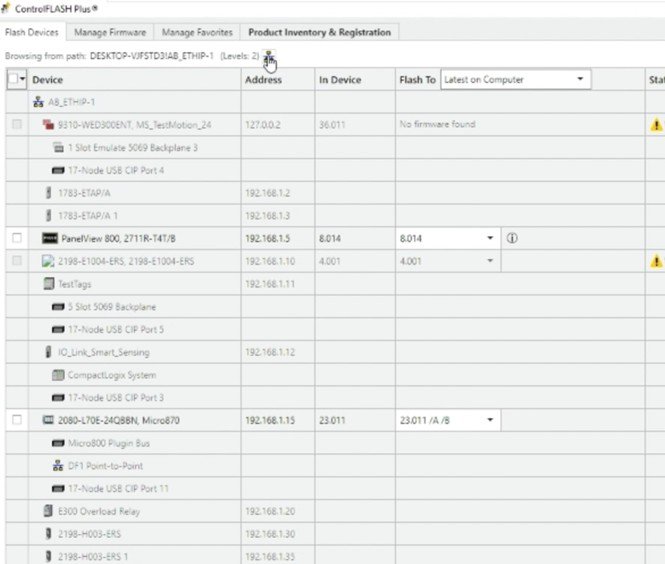
En caso de no tener actualizados estos firmwares, es posibles actualizarlos a través de la aplicación ControlFLASH Plus que se instala automáticamente junto a la instalación del Connected Components Workbench.
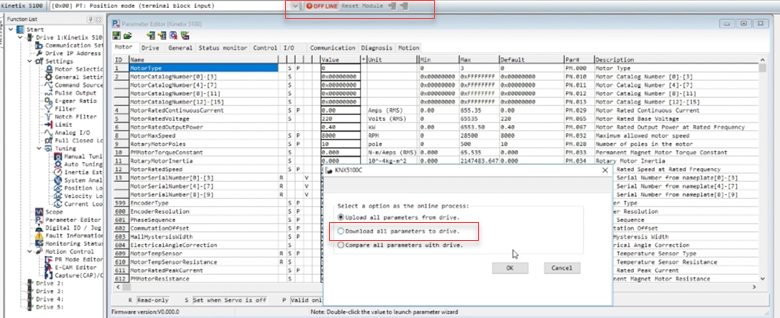
Al completar el anterior procedimiento, se debe estar corriendo en línea y correctamente.
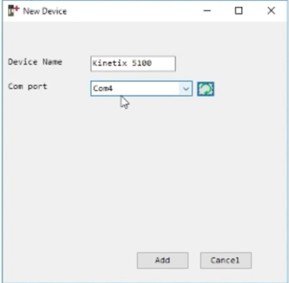
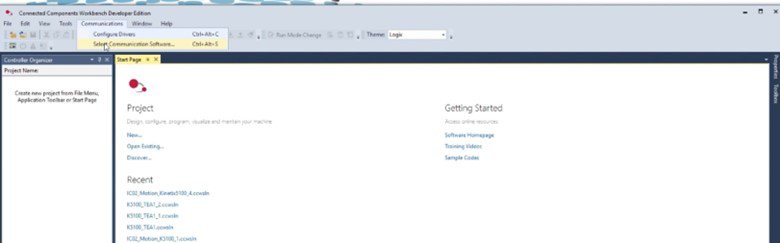
Procedemos a revisar y confirmar las diferentes configuraciones de los settings principales del programa que son necesarios para el correcto funcionamiento, como asignar IP y communication Setting.
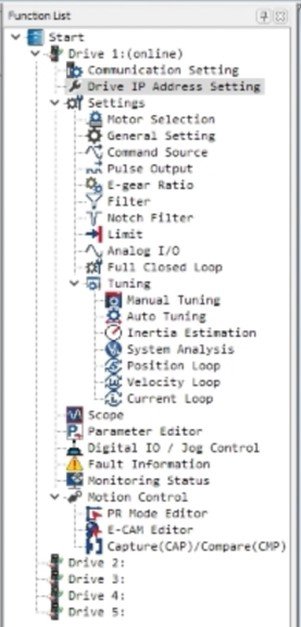
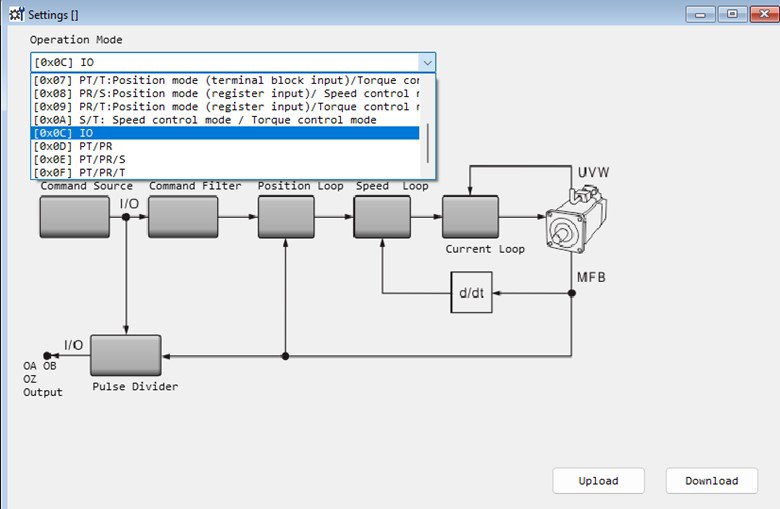
Operation Mode I/O → acá estamos configurando el modo de Operación, esto permite que otro dispositivo tenga control sobre el drive, en este caso el Micro800.
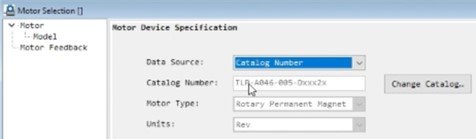
Motor Selection → Escogiendo la opción por catalog number, debemos ingresar el del motor TLP que propusimos en la sección de la lista materiales, luego confirmar el método funcionamiento incremental.
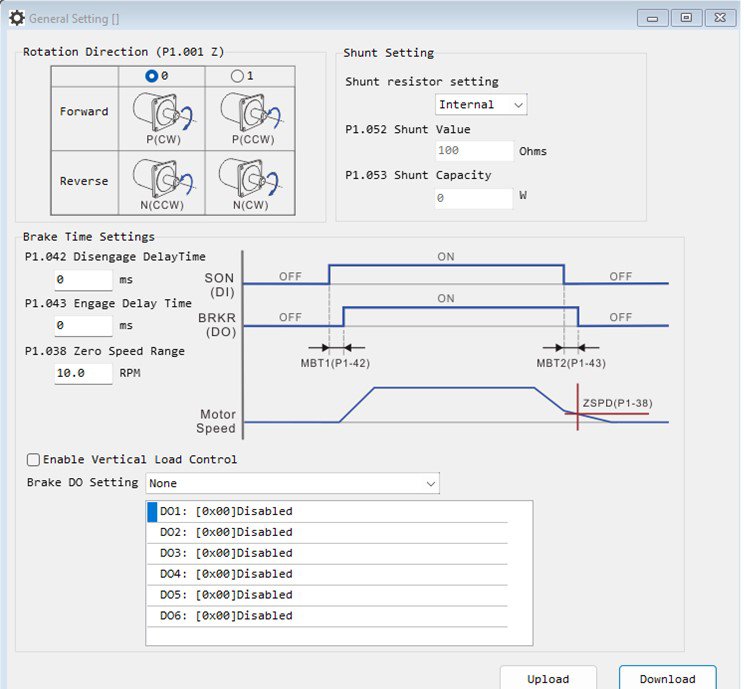
General Setting → Podemos configurar el sentido de giro (1), si se trabaja con resistencia de frenado – podemos definirla (2). Se tiene la opción de habilitar la opción de frenado y tiempo de este (3), y la configuración de velocidad 0 – la notificación de zero speed (4)
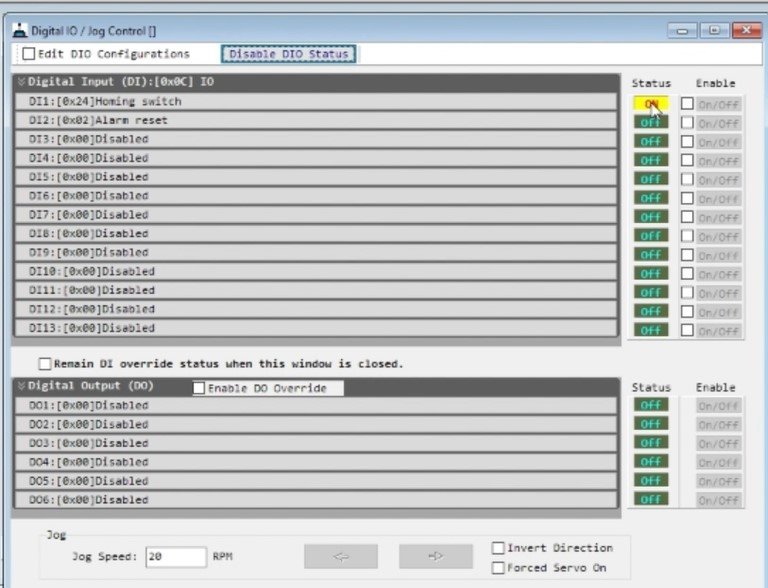
Digital I/O → Se asignan las entradas según los requerimientos que necesitamos, para este caso es confirmar esa primera entrada que debe ser “Homing Switch”, y hacer las respectivas pruebas de status y funcionamiento, principalmente por cuestiones de buena conexión, como se ve en la imagen respectiva.
Nota: Importante para futuro funcionamiento del proyecto que guarden el proyecto en su PC – “File, Save Project As”.
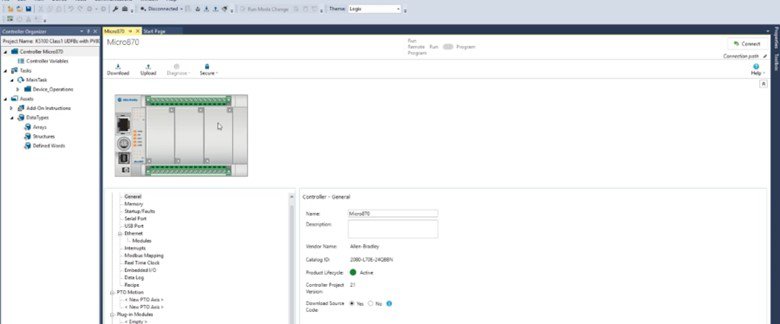
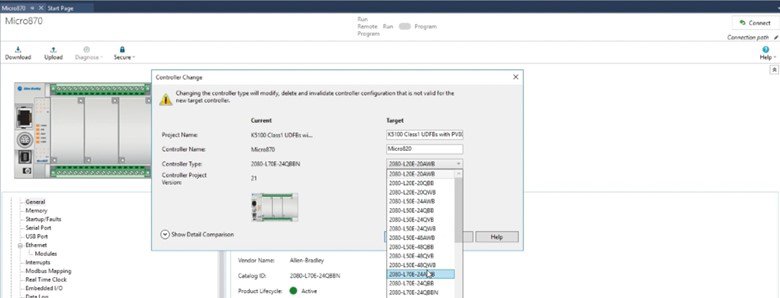
El primer ajuste que debemos hacer es en el controlador Micro 870, debemos hacer clic derecho – controller change - y seleccionar el catálogo del dispositivo con el que estamos trabajando en practica (que podemos revisar de la lista de materiales al inicio de la documentación).
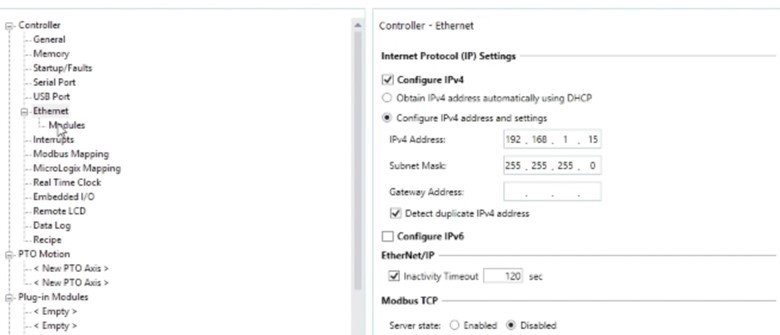
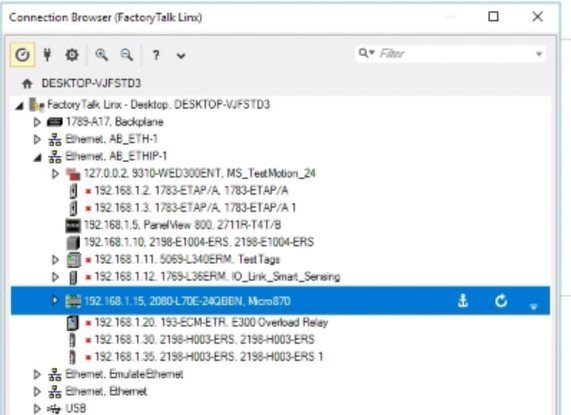
Luego de completada la acción anterior, es importante, en las opciones del controlador Ethernet, poder confirmar que la dirección IP este configurada correctamente según los criterios que definimos inicialmente.
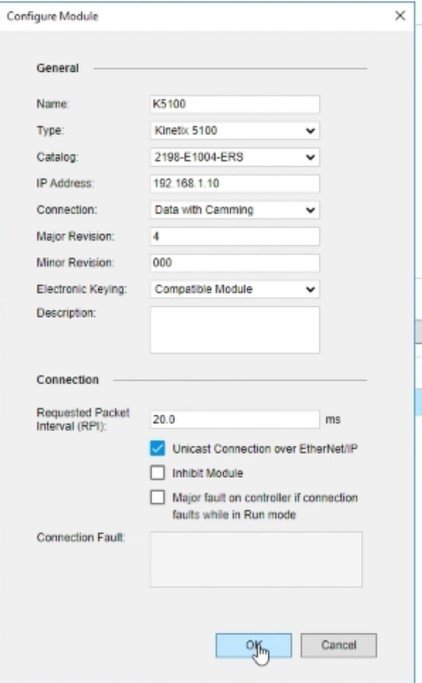
Por último, en la opción de Modules, debemos asegurar que los settings que está en la imagen siguiente se encuentren correctamente. Estamos confirmando que el dispositivo conectado al micro800 por Ethernet, sea el respectivo drive K5100 con el que estamos trabajando, confirmar su dirección IP, la conexión y la compatibilidad de modulo.
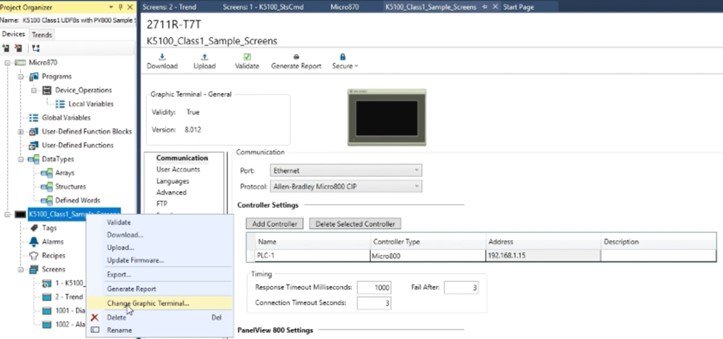
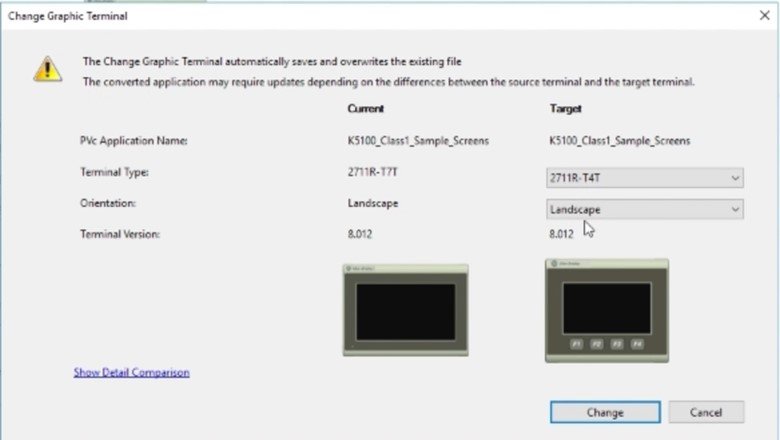
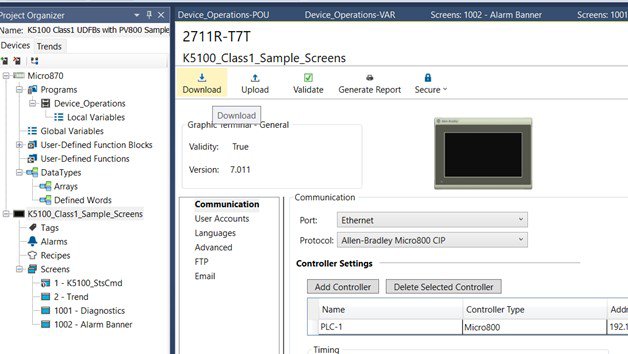
Al igual que cuando empezamos a realizar los primeros ajustes con la configuración del Micro800, en este caso, vamos a realizar el primer ajuste con la Panel View 800, cambiando el tipo de pantalla en el proyecto, ajustándose a la seleccionada en la lista de materiales propuesta previamente
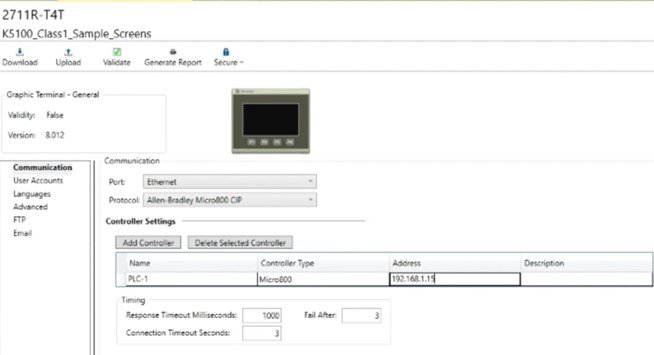
Importante que logremos confirmar (y ajustar si es el caso) en este apartado, la dirección IP que se definió previamente, así como que sea el uso del Puerto Ethernet y el Protocolo de comunicación industrial CIP. El resto de información se deja por defecto como viene configurada.
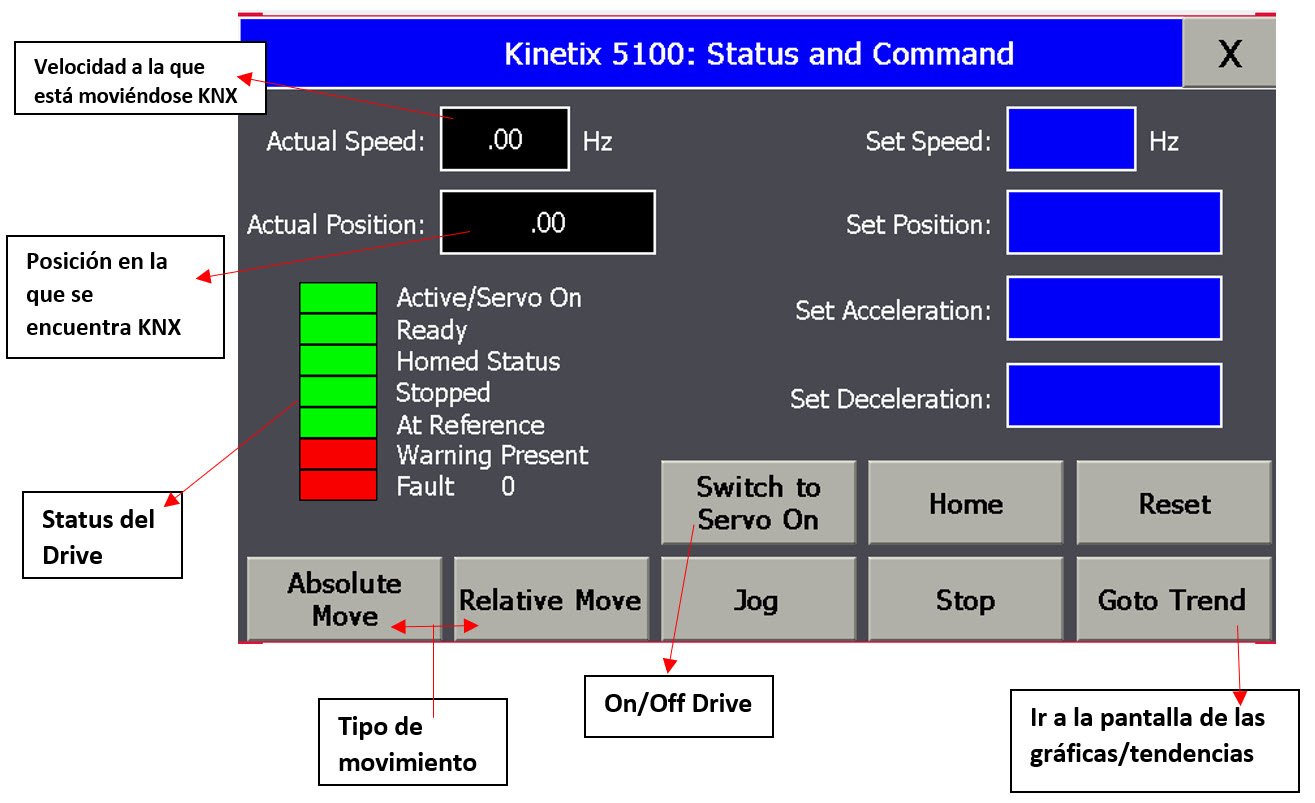
En esta aplicación se definió trabajar con dos pantallas, la primera, pantalla principal está compuesta de la siguiente manera:
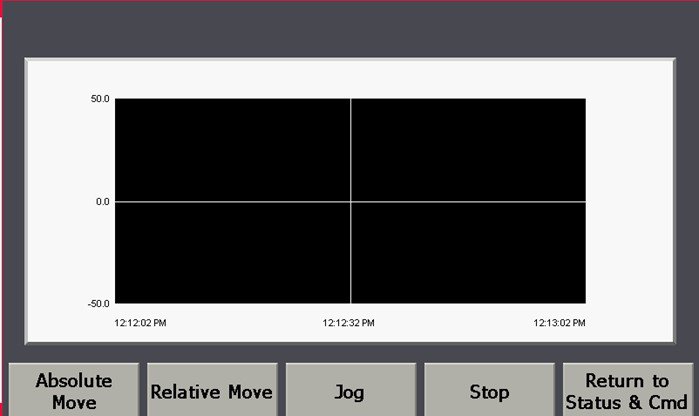
La segunda pantalla, que esta enfocada en graficar las tendencias y el comportamiento del servomotorcon respecto al tiempo, adicionalmente, los botones para usar en esta pantalla son prácticamente los mismos de la pantalla principal con su respectivo funcionamiento.
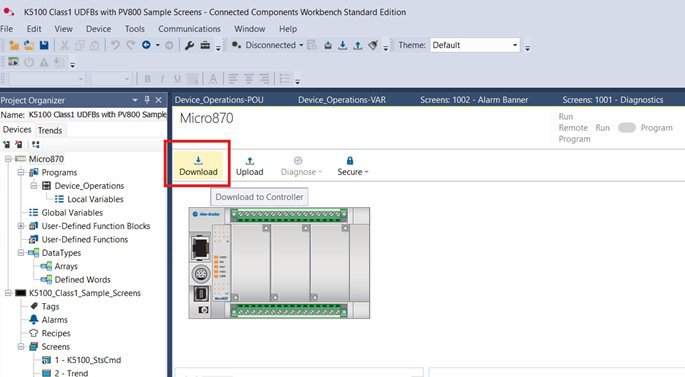
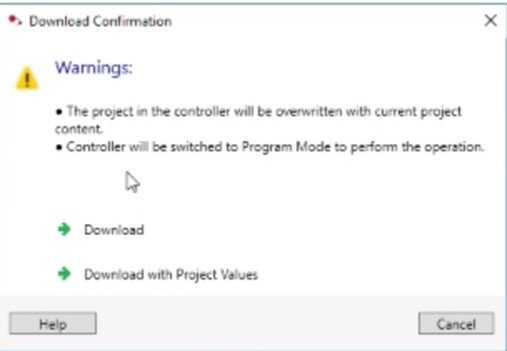
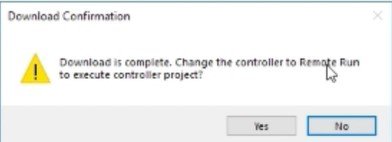
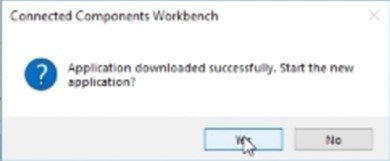
Después de haber hecho las anteriores configuraciones, ya se encuentra todo listo para descargar el programa en nuestro controlador Micro800 para poder comprobar el funcionamiento de nuestra aplicación.
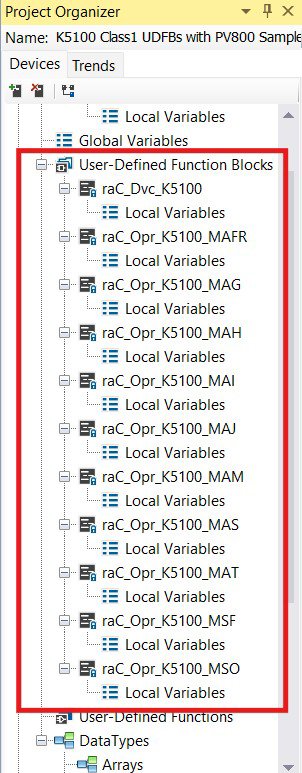
La siguiente imagen es para destacar todas las librerías necesarias para poder programar el control del drive en nuestro controlador Micro 800 – es recomendable que en caso de que se quiera trabajar con proyectos nuevos similares al de nuestra aplicación pueda leer y seguir los pasos que comparten en las notas ténicas/manuales que compartimos en la sección de Links de interés:
Connected Components Workbench v21: Implicit messaging UDFBs for Kinetix 5100 and PowerFlex 520-series drives
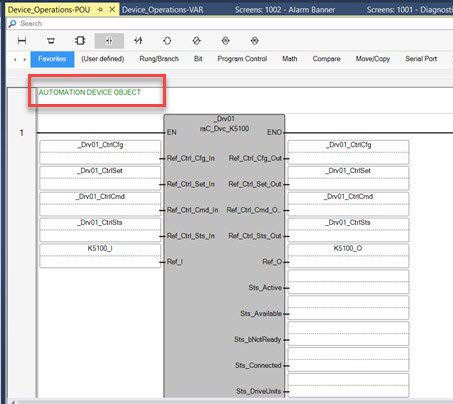
El DEVICE OBJECT es el bloque principal del programa, avanzando en las líneas de código de los bloques funcionales, podremos ir encontrando la programación de todos los botones que vimos estaban en las pantallas y demás componentes de la aplicación.
Es clave que se cree cada DEVICE OBJECT para cada uno de los drives que se van a asignar al controlador Micro800, en caso de que del proyecto o aplicación requiera trabajar con más de uno.
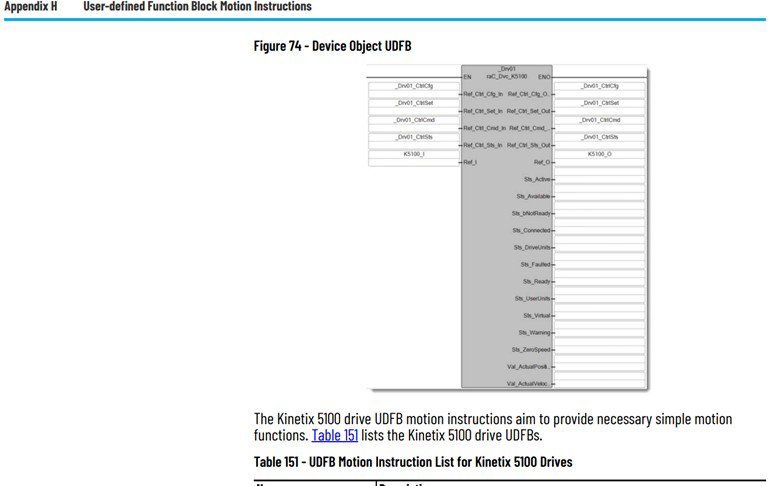
Se recomienda poder a detalle el apéndice completo para poder lograr la compresión de como todos estos bloques de instrucciones pueden ser programadas según las necesidades/objetivos para nuestras aplicaciones o proyectos.
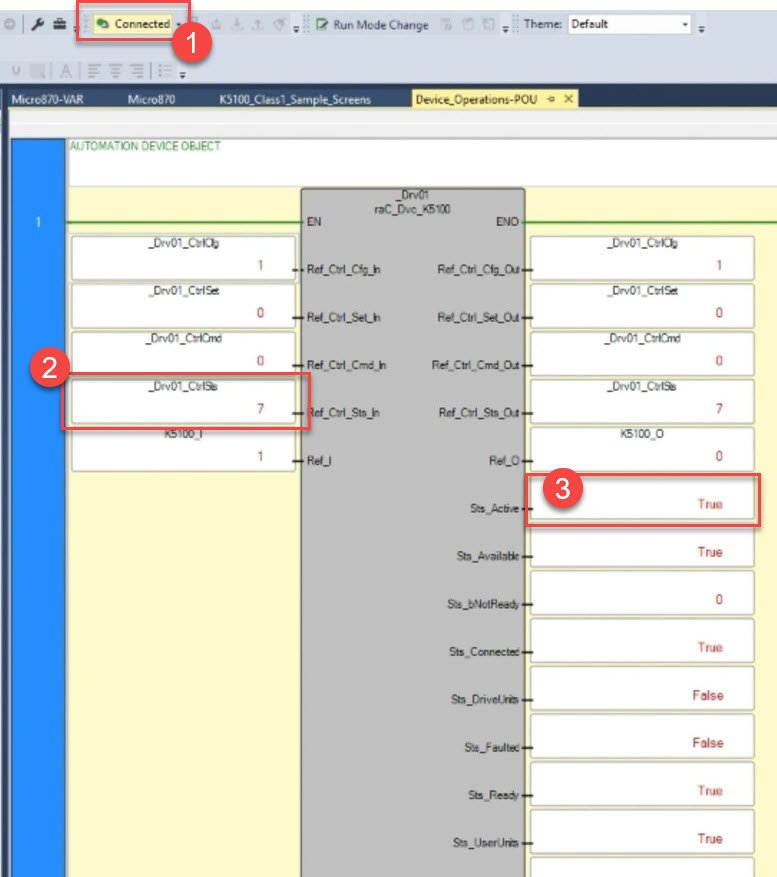
Con la aplicación en funcionamiento y poder realizar ciertas pruebas de que este corriendo bien, podemos iniciar:
Verificar la conexión con el Micro800
En el bloque del DEVICE OBJECT , observar el control status – 7 – disponible para recibir instrucciones
En Active = True – El servomotor esta “ON” ya listo para arrancar
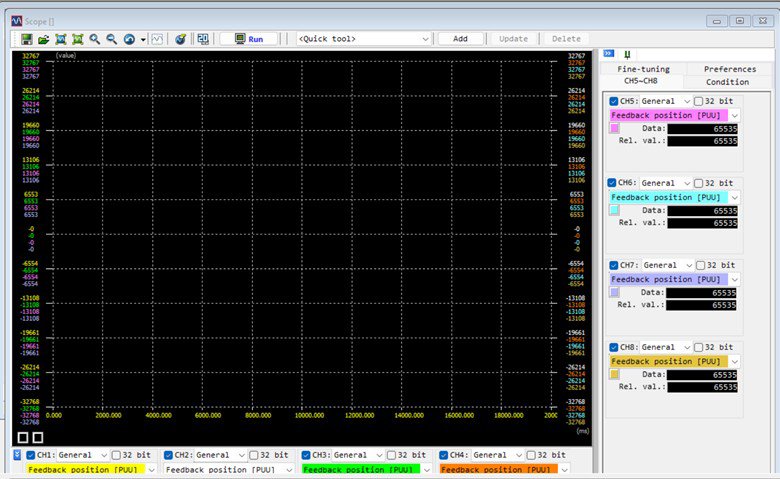
Una de las formas de poder verificar el funcionamiento de la aplicación es trabajando con la opción de SCOPE, en el KNX5100C – el software de configuración de nuestro drive.
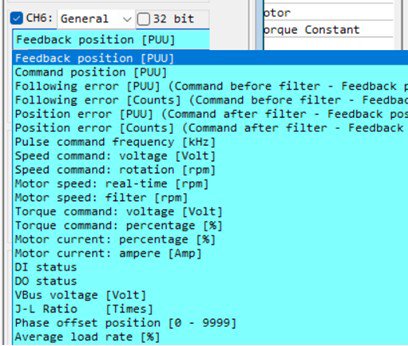
Podemos Observar en cada canal cuales son las variables a graficar y analizar. Ejemplo, Channel 5 Position – Channel 6 Velocidad (y incluso podemos realizar cambios para observar otras variables de interés para nuestros objetivos)
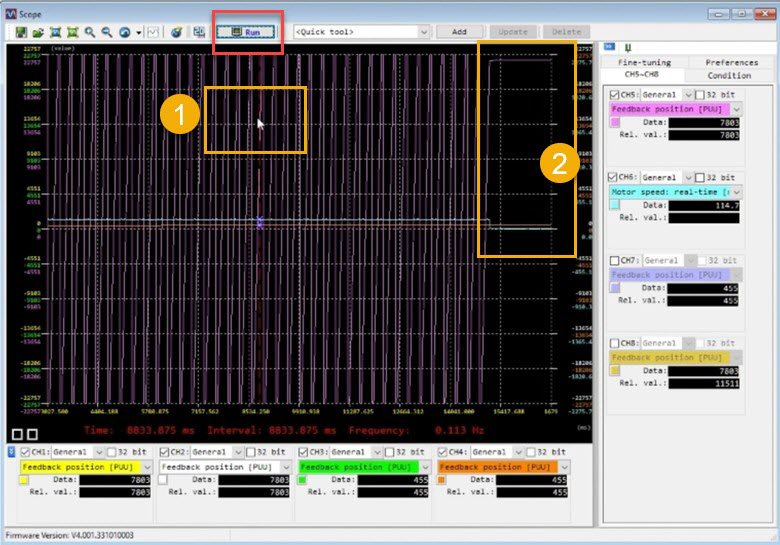
Al hacer clic en el botón de Run, para poner en marcha y empezar a graficar la respuesta del sistema, tenemos múltiples opciones con la función de Scope en el software de KNX5100C, esta es la información que queremos entender para nuestra aplicación de arranque de control de movimiento.
Un ejemplo claro, es la información que esta a nuestra disposición, como se observa en la imagen anterior, podemos ubicar el cursor en cualquier momento de la gráfica, y en los cuadros informativos de los canales que revisamos previamente, podemos identificar la información de las variables definidas para observar en dichos canales – para nuestro ejemplo, posición y velocidad del variador en dicho momento en específico seleccionado (1).
También podemos observar los cambios a través del tiempo (2), en el caso donde se detuvo la velocidad a 0, se identifica la posición también fija del servomotor a partir de este instante.
Configuración Práctica del Micro800 y del Kinetix 5100
Versión 1.2 - Mayo de 2026
¡Suscríbase!
Manténgase al día con los lanzamientos de aplicaciones y las novedades del Innovation Center.
El contenido de este sitio ha sido traducido mediante inteligencia artificial (IA) sin revisión humana o ediciones. El contenido podría contener errores o inexactitudes, y se proporciona “tal cual” sin ninguna garantía. El texto oficial es la versión en inglés del contenido.
Actualice sus preferencias de cookies para continuar.
Esta función requiere cookies para mejorar su experiencia. Actualice sus preferencias para permitir estas cookies.:
Cookies de Redes Sociales
Cookies Funcionales
Cookies de Performance
Cookies de Marketing
Todas las cookies
Puede actualizar sus preferencias en cualquier momento. Para más información, vea nuestro {0}
Política de Privacidad