Estados de los ejes de control de movimiento
La norma básica del comportamiento del eje en un nivel superior en el que hay activados varios bloques de funciones de control de movimiento es que los comandos de movimiento siempre se adoptan de manera secuencial, aunque el controlador permita llevar a cabo un procesamiento en paralelo. Cualquier comando de movimiento es una transición que cambia el estado del eje y, como consecuencia, modifica la forma en que se calcula el movimiento actual.
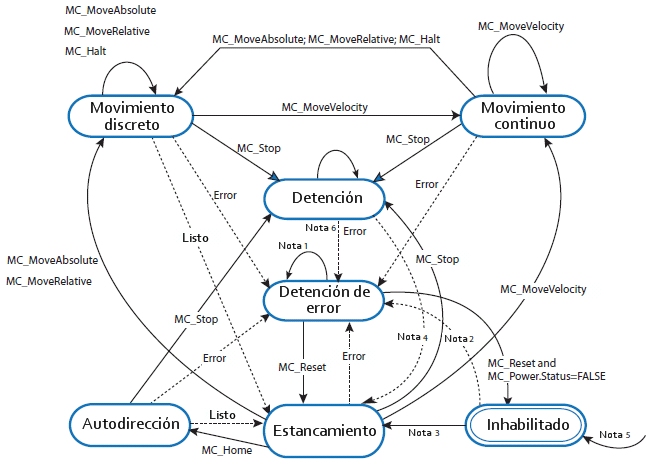
Diagrama de estado de los ejes de control de movimiento
El eje siempre tiene uno de los estados definidos en el siguiente diagrama.
Diagrama de estado de los ejes de control de movimiento
Comportamiento del estado del eje de control de movimiento
No | Nota |
|---|---|
1 | En los estados Parada de error y Parando, todos los bloques de funciones (salvo MC_Reset) se pueden activar, aunque no se ejecutarán. MC_Reset genera una transición al estado Atascado. Si se produce un error mientras la máquina está en el estado Parando, se generará una transición al estado Parada de error. |
2 | Power.Enable = Cierto y se produce un error en el eje. |
3 | Power.Enable = Cierto y no se produce ningún error en el eje |
4 | MC_Stop.Done AND NOT MC_Stop.Execute. |
5 | Si se activa MC_Power con Enable = FALSO, el eje pasa al estado Deshabilitado para cada estado, incluyendo Parada de error. |
6 | Si se produce un error mientras la máquina está en estado Parando, se generará una transición al estado Parada de error. |
Valores de código del estado del eje de control de movimiento
Puede supervisar el estado del eje mediante la función Monitor de eje.
Valor de estado | Nombre de estado |
|---|---|
0x00 | Deshabilitado |
0x01 | Atascado |
0x02 | Movimiento discreto |
0x03 | Movimiento continuo |
0x04 | Autodirección |
0x06 | Parando |
0x07 | Parada de error |
Actualización del estado del eje
Al ejecutarse el movimiento, la actualización del estado del eje depende de cuándo llama la exploración de POU al bloque de funciones de movimiento relevante. Tal es el caso aunque el perfil de movimiento esté controlado por el motor de movimiento como tarea en segundo plano y sea independiente de la exploración de POU.
Por ejemplo, en un eje en movimiento de un POU de lógica de escalera (estado de una línea = Cierto), se explora un bloque de funciones MC_MoveRelative de la línea y el eje comienza a moverse. Antes de que se complete MC_MoveRelative, el estado de la línea pasa a ser FALSO y MC_MoveRelative no se vuelve a explorar. En este caso, el estado del eje no puede cambiar de Movimiento discreto a Atascado, aunque se detenga por completo y la velocidad sea 0.
Entregue su opinión