Definición del dispositivo
Para cambiar la definición de un dispositivo, seleccione Device definition en la vista Overview.
Cuando se añade el módulo al proyecto por primera vez, el cuadro de diálogo Device Definition muestra solo la vista Overview con el canal 0 establecido de manera predeterminada en Disabled. Dependiendo de lo que haya elegido para el parámetro Channel 0, puede tener parámetros adicionales.
Si establece Channel 0 en Modbus Master, puede ver Channel 0: Modbus Master view. Para obtener más información, consulte Canal 0 – Vista del Modbus maestro.
Si establece Channel 0 en Overview view en Modbus Slave, puede ver Channel 0: Modbus Slave view. Para obtener más información, consulte Canal 0 – Vista del Modbus esclavo.
Vista Overview
Utilice la vista de descripción general del cuadro de diálogo Device Definition para definir un dispositivo o para cambiar la definición del dispositivo.
Cuadro de diálogo Device Definition – Vista Overview
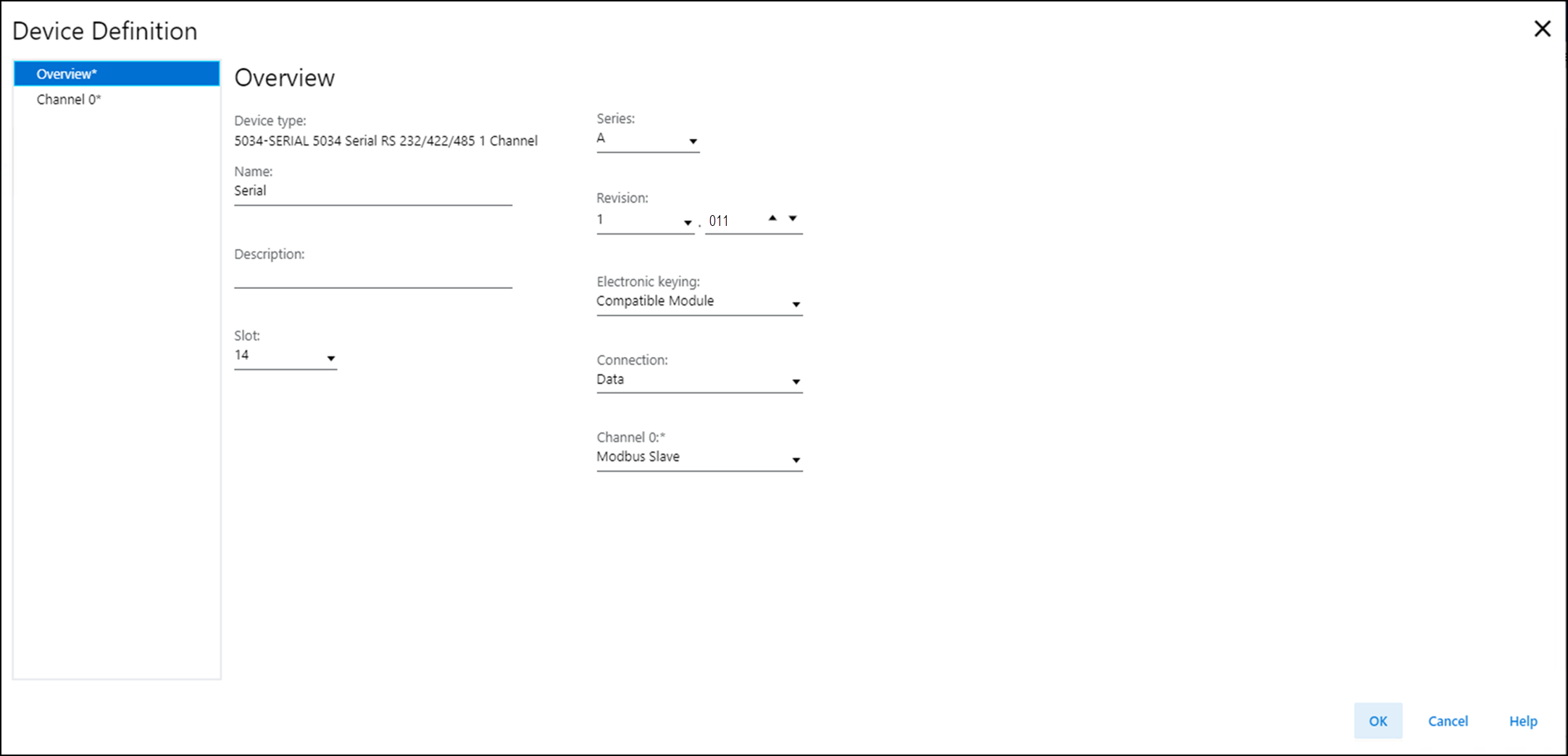
La vista Overview incluye estos parámetros:
Parámetro | Definición | Elecciones disponibles |
|---|---|---|
Device Type | Muestra el número de catálogo y el tipo de dispositivo. | Específico del dispositivo |
Name | Introduzca un nombre de dispositivo compatible con IEC
61131. Si se introduce un carácter no válido en este campo o si el
nombre supera los 40 caracteres, el software lo ignora. | Todos los valores válidos |
Description | Introduzca la descripción del dispositivo. | Todos los valores válidos |
Slot | Especifique el número de ranura donde reside el dispositivo.
Solo las ranuras entre 1 y el número máximo de dispositivos
de E/S son válidas dependiendo de la plataforma Cuando se crea el dispositivo, el número de ranura cambia de
manera predeterminada a la primera posición de ranura
disponible. Cuando el controlador se cambia a uno que acepta un conteo de
E/S máximo más pequeño, el valor de ranura actual puede no
ser válido. | 1...32 |
Series | Especifica la serie del dispositivo. | Específico del dispositivo |
Revision | Especifica las revisiones mayores y menores del dispositivo.
El rango válido para la revisión menor es de 1...255. | Específico del dispositivo |
Electronic Keying | Define la codificación electrónica utilizada para el
dispositivo. La codificación electrónica compara el
dispositivo definido en el proyecto con el dispositivo
instalado. Si falla la codificación, se genera un fallo. Para obtener información más detallada sobre la codificación
electrónica, consulte el documento Electronic Keying in
Logix 5000 Control Systems Application Technique,
publicación LOGIX-AT001. |
ATENCIÓN:
Sea sumamente cuidadoso al utilizar Disabled Keying;
si se usa de forma incorrecta, esta opción puede
ocasionar lesiones personales o la muerte, daños
materiales o pérdidas económicas. Le recomendamos encarecidamente que no use la opción
Disable Keying. Si utiliza Disable Keying, deberá asumir total
responsabilidad por la determinación de si el
dispositivo que se va a utilizar puede satisfacer
los requisitos funcionales de la aplicación. |
Connection | Especifica el tipo de datos transferidos entre el dispositivo
y el controlador. | Data (predeterminado) |
Channel 0 | Especifica el protocolo usado por el canal para transmitir
datos a y recibir datos desde un dispositivo serial. |
Para obtener más información, consulte Tabla 2. |
Modo de comunicación | Definición |
|---|---|
Disabled | El canal no se utiliza y no se habilita ninguna conexión física entre el controlador y el módulo serial. |
Generic ASCII | Modo general de comunicación serial en el que se puede definir que cualquier dato del usuario se transmita o reciba en la comunicación. |
Modbus Master | El dispositivo envía consultas o comandos de escritura Modbus a los dispositivos esclavos conectados a él. |
Modbus Slave | El dispositivo funciona como un esclavo de un maestro externo y espera los comandos del maestro. |
Canal 0 – Vista del Modbus maestro
La vista Modbus Master le permite definir el dispositivo Modbus Master.
Canal 0 – Ejemplo de vista de Modbus maestro
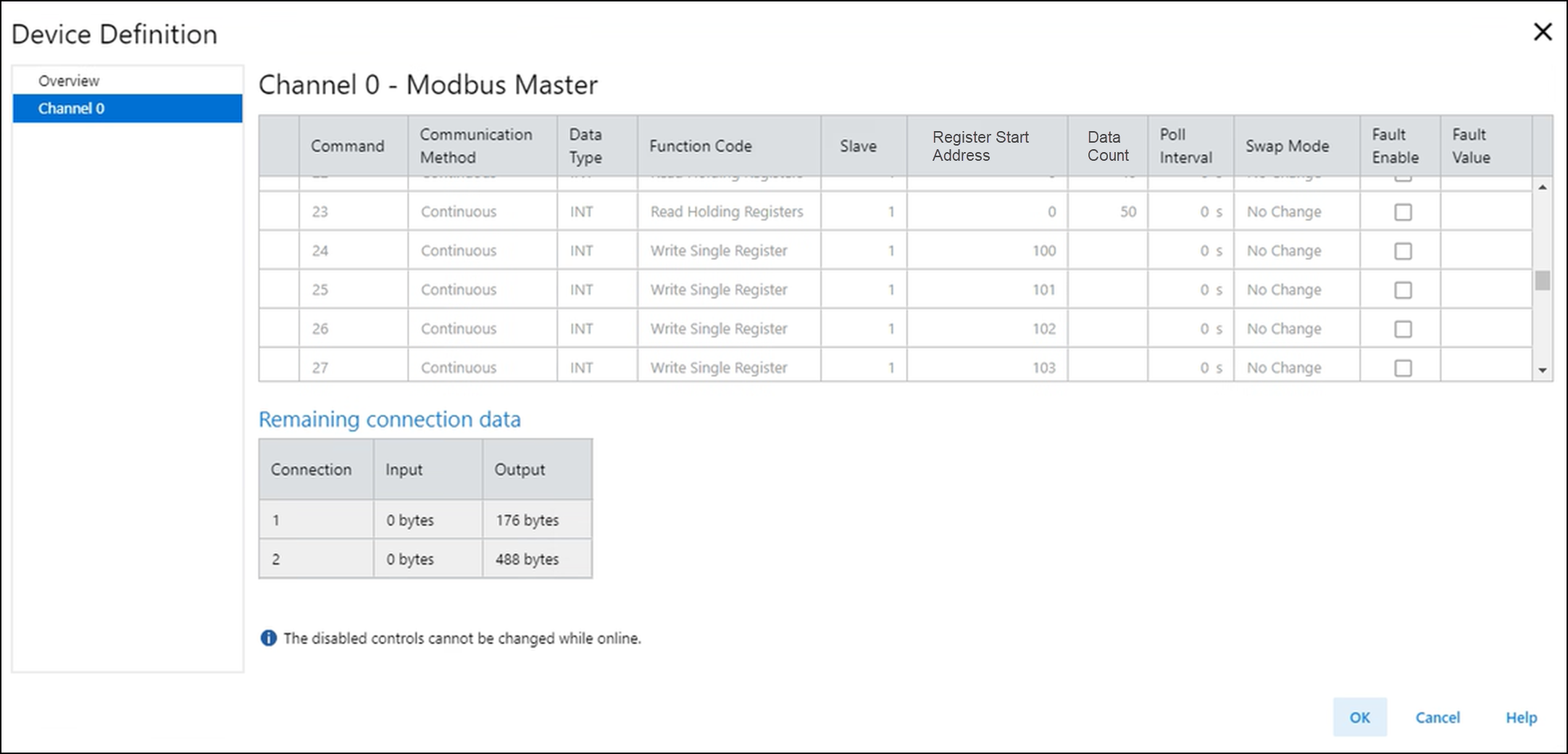
La vista Modbus Master incluye estos parámetros:
Parámetro | Definición | Elecciones disponibles | ||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
Command | Muestra el índice del comando que se está configurando. | 0...49 | ||||||||||||||||||
Communication Method | Especifica el método de comunicación para el comando.
CONSEJO:
Los parámetros no están disponibles cuando el método de comunicación está inhabilitado.
|
| ||||||||||||||||||
Data Type | Especifica el tipo de datos para el comando. |
| ||||||||||||||||||
Function Code | Especifica la función del comando. Consulte Tabla 4 para ver la descripción de cada opción de código de función. | Especifica la función del comando. Los valores válidos dependen del tipo de datos. Si el tipo de datos es BOOL:
Si el tipo de datos es INT:
Si el tipo de datos es REAL:
| ||||||||||||||||||
Slave | Especifica la dirección de nodo del dispositivo Modbus esclavo. | Las direcciones válidas de un dispositivo Modbus esclavo específico son 1...247. Para el comando de difusión, establezca el esclavo en 0. El comando de difusión solo puede ser comandos de escritura. | ||||||||||||||||||
Register Start Address | Especifica la dirección inicial de los registros que se están leyendo o escribiendo. | 0...65,535 | ||||||||||||||||||
Data Count | Especifica el número de datos del tipo de datos que se está leyendo o escribiendo. Si se utiliza REAL, cada dato utiliza 2 registros. El número de registros consecutivos leídos/escritos es el siguiente:
La dirección final causada por Data Count no debe exceder la dirección máxima de 65,535. La dirección final se calcula como (Register Start Address + Number of registers - 1). | Los valores válidos de longitud de datos dependen del tipo de datos y del código de función.
| ||||||||||||||||||
Poll Interval | Especifica el número de segundos entre cada vez que se ejecuta el comando cuando está en modo continuo. Por ejemplo, si el intervalo de encuesta se establece en 10, el Modbus maestro espera 10 segundos antes de volver a ejecutar el comando. Cuando el intervalo de encuesta se establece en 0, el Modbus maestro repite la transmisión del comando lo más rápido posible.
CONSEJO:
Este parámetro no está disponible cuando el método de comunicación es condicional.
| 0...32,767 | ||||||||||||||||||
Swap Mode | Especifica la configuración de cada 4 bytes de datos recibidos o transmitidos al Modbus esclavo. |
CONSEJO:
A, B, C y D representan cuatro bytes adyacentes en los datos recibidos/transmitidos.
| ||||||||||||||||||
Fault Enable | Determina si se sobrescriben los datos recibidos con un valor de fallo si falla el comando de lectura. Seleccione la casilla de selección para sobrescribir los datos recibidos con el valor de fallo.
CONSEJO:
Este parámetro no está disponible cuando el código de función es un comando de escritura.
| – | ||||||||||||||||||
Fault Value | Especifica el valor para reemplazar los datos recibidos si falla el comando de lectura. | – | ||||||||||||||||||
Connection 1/Connection 2 | La comunicación de comandos utiliza la conexión 1 de manera predeterminada. Si un tamaño de datos de comando excede la cantidad restante de datos disponible para la conexión 1, el comando utiliza la conexión 2 en su lugar. | – | ||||||||||||||||||
Input | Muestra la cantidad de datos de lectura que quedan para dicha conexión. | – | ||||||||||||||||||
Output | Muestra la cantidad de datos de escritura restantes para dicha conexión. | – |
Tipo de datos | Código de función | Descripción |
|---|---|---|
BOOL | Read Coil (código de función 01) | Lee 1...2000 estado contiguo de bobinas en un dispositivo esclavo. |
Read Discrete Inputs (código de función 02) | Lee 1...2000 estado contiguo de entradas discretas en un dispositivo esclavo. | |
Write Single Coil (código de función 05) | Escribe una sola salida en ON u OFF en un dispositivo esclavo. | |
Write Multiple Coils (código de función 15) | Escribe 1...1968 salida contigua a activado o desactivado en un dispositivo esclavo. | |
INT | Read Holding Registers (código de función 03) | Lee 1...125 bloques contiguos de registros de retención INT en un dispositivo esclavo. |
Read Input Registers (código de función 04) | Lee 1...125 bloques contiguos de registros de entrada INT en un dispositivo esclavo. | |
Write Single Register (código de función 06) | Escribe un solo registro de retención en un dispositivo esclavo. | |
Write Multiple Registers (código de función 16) | Escribe 1...123 bloques contiguos de registros de retención INT en un dispositivo esclavo. | |
REAL | Read Holding Registers (código de función 03) | Lee 1...62 bloques contiguos de REAL Holding Registers en un dispositivo esclavo. |
Read Input Registers (código de función 04) | Lee 1...62 bloques contiguos de registros de entrada REAL en un dispositivo esclavo. | |
Write Multiple Registers (código de función 16) | Escribe 1...61 bloques contiguos de REAL Holding Registers en un dispositivo esclavo. |
Limitaciones de la lista de comandos de maestro
Las limitaciones de la lista de comandos de maestro son:
- Se pueden crear 50 comandos como máximo. Los comandos están sujetos a la memoria de conexión disponible.
- Cada Modbus maestro admite hasta dos conexiones de datos.
- La conexión 1 admite un máximo de 464 bytes de datos de lectura y 476 bytes de datos de escritura.
- La conexión 2 admite un máximo de 472 bytes de datos de lectura y 488 bytes de datos de escritura.
- Cada comando utiliza:
- 2 bytes de datos de entrada por registro de retención o registro de entrada leído.
- 1 byte de datos de entrada por cada 1…8 bobinas o entradas discretas leídas.
- 2 bytes de datos de salida por registro de retención escrito.
- 1 byte de datos de salida por cada 1…8 bobinas escritas.
- Aparece un mensaje de error cuando se excede la memoria de conexión.
Uso de memoria de comandos de maestro
A continuación, se muestra un ejemplo del uso de la memoria de comandos de maestro:
- Configuración de conexión única máxima para registros:
- 223 palabras * 2 bytes/palabra leída = 446 bytes de entrada
- 241 palabras * 2 bytes/palabra escrita = 482 bytes de salida

- Configuración de conexión única máxima para bobinas:
- 3576 bits / 8 bits/byte leído = 447 bytes de entrada
- 3856 bits / 8 bits/byte escritos = 482 bytes de salida

Canal 0 – Vista del Modbus esclavo
La vista del Modbus esclavo le permite definir el dispositivo Modbus Slave.
Canal 0 – Ejemplo de vista de Modbus esclavo
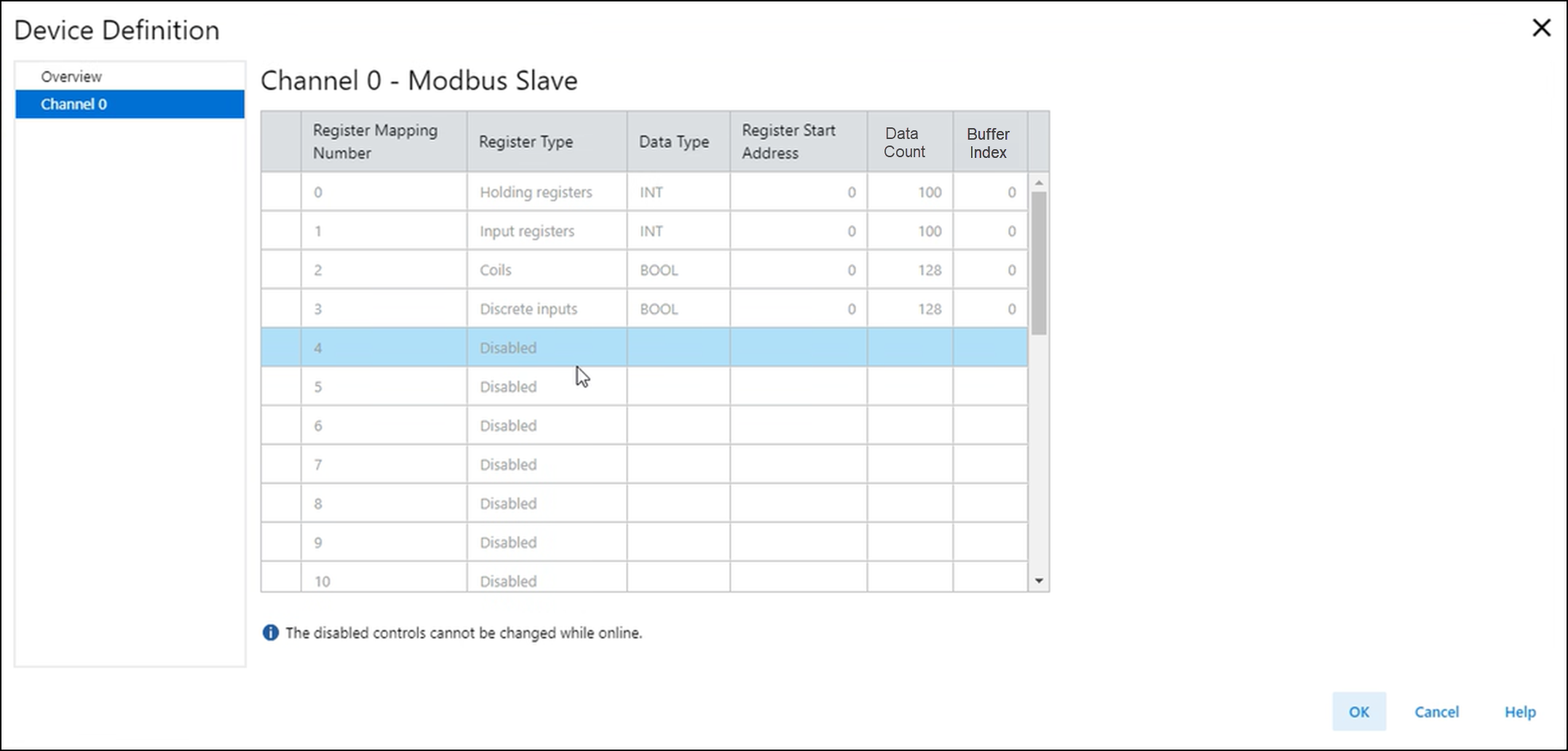
La vista de Modbus esclavo incluye estos parámetros:
Parámetro | Definición | Elecciones disponibles |
|---|---|---|
Register Mapping Number | Muestra el número de asignación del registro. | 0...29 |
Register Type | Especifica el tipo de registro.
CONSEJO:
Los parámetros no están disponibles cuando el tipo de registro está inhabilitado.
|
|
Data Type | Especifica el tipo de datos para el registro. | Las opciones disponibles se basan en el tipo de registro que seleccione. Para bobinas y entradas discretas, la opción disponible es:
Para los registros de retención y los registros de entrada, las opciones disponibles son:
|
Register Start Address | Especifica la dirección inicial del registro. | 0...65,535 |
Data Count | Especifica el número de datos del tipo de datos. | Los valores válidos dependen del tipo de datos:
El número de registros consecutivos leídos/escritos es el siguiente:
En el caso de dos asignaciones con el mismo tipo de registro, sus rangos de registro no deben solaparse. El rango de registro de cada asignación abarca desde la dirección de inicio del registro hasta la dirección final de la asignación. La dirección final se calcula como (Register Start Address + Number of registers - 1). La dirección final de cada asignación no debe exceder la dirección máxima de 65,535. |
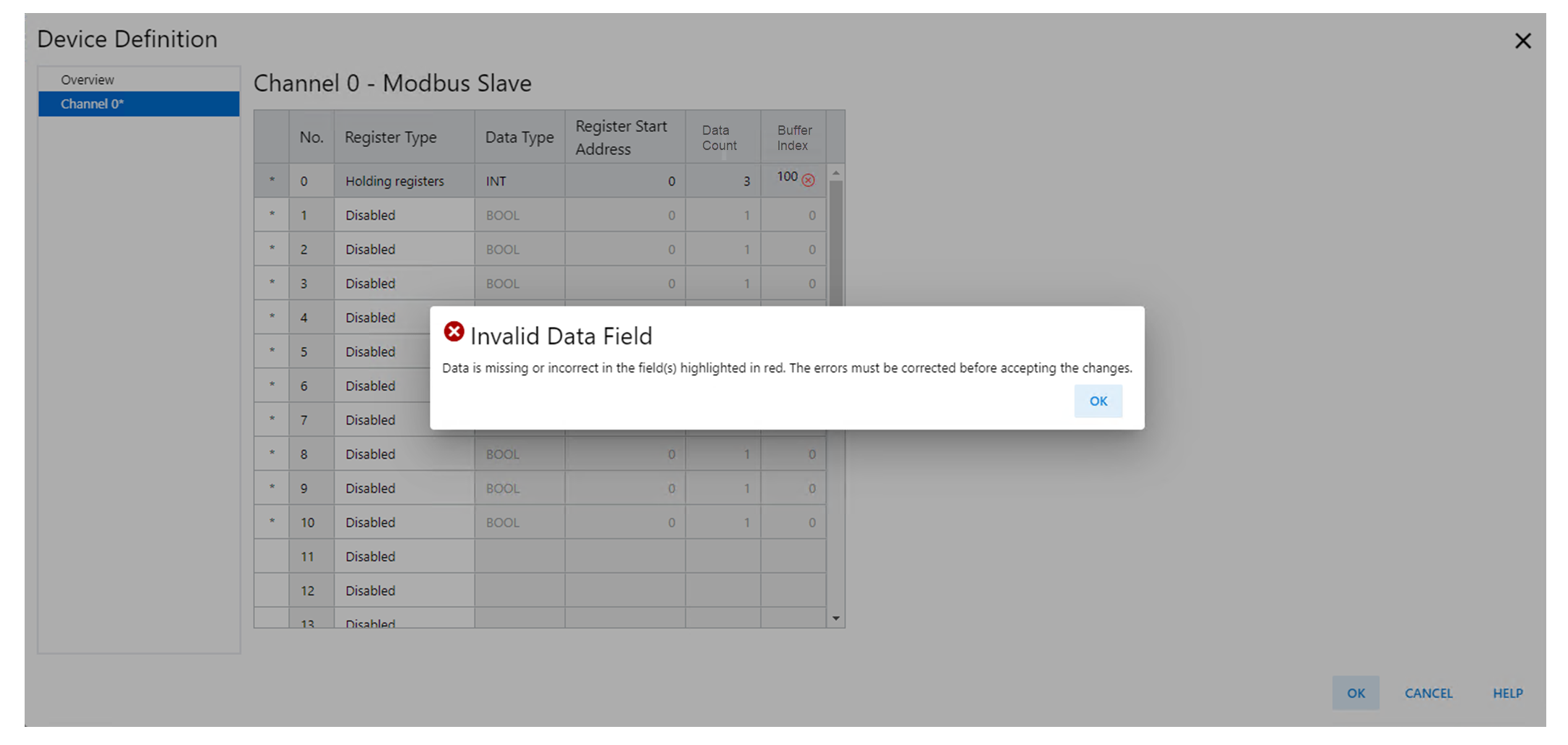
Buffer Index | Especifica el índice del búfer de los búferes de registro en los tags de entrada y/o salida. Estos tags son HoldingRegister[y], Coil[z], InputRegister[y] y DiscreteInput[z], donde “y” y “z” son Buffer Index. |
El número de búferes consecutivos ocupados por esta asignación de registro es el siguiente:
En el caso de dos asignaciones de registros con el mismo tipo de registro, sus rangos de búfer no deben superponerse. El rango del búfer abarca desde el índice del búfer hasta el índice del búfer final causado por Data Count. El índice del búfer final se calcula como (Buffer Index + Number of buffers - 1). El índice del búfer final de cada asignación no debe exceder el rango válido de Buffer Index definido anteriormente. |
Ejemplo de error de índice de búfer
Límites de tabla de direcciones en Modbus esclavo
Se pueden crear hasta 30 rangos de puntos de datos en la tabla de direcciones en Modbus esclavo, dependiendo de la memoria disponible:
- Máximo de 200 bytes de registros de retención (hasta 100 INT o 50 REAL)
- Máximo de 200 bytes de registros de entrada (hasta 100 INT o 50 REAL)
- Hasta 128 bobinas (índices de datos 0…15 a límites de 8 bits)
- Hasta 128 entradas discretas (índices de datos 0…15 a límites de 8 bits)
Ejemplo de asignación de datos en Modbus esclavo
Ejemplo de asignación de datos en Modbus esclavo
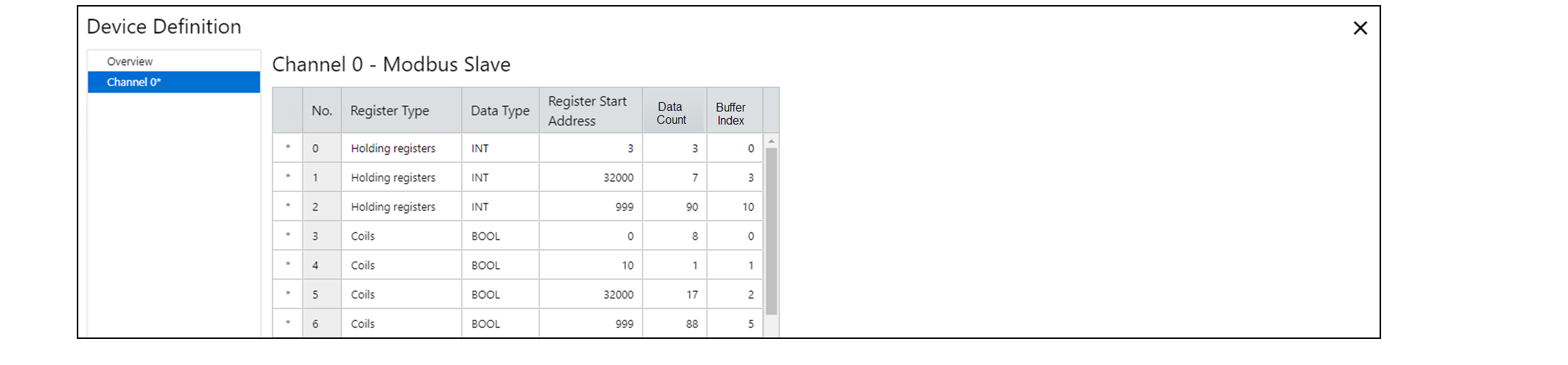
Los datos representados en la Figura 5 pueden interpretarse desde los tags de módulo de la siguiente manera:
- v:2:O1.Slave.HoldingRegister[0…2] = 400003…400005
- v:2:O1.Slave.HoldingRegister[3…9] = 432000…432006
- v:2:O1.Slave.HoldingRegister[10…99] = 400999…410088
- v:2:O1.Slave.Coil[0].0…0.7 = 000000…000007
- v:2:O1.Slave.Coil[1].0 = 000010
- v:2:O1.Slave.Coil[2].0…[4].0 = 0320000…032016
- v:2:O1.Slave.Coil[5].0…[15].7 = 000999…001086

Entregue su opinión