IPIDController function block operation
When Input Auto is TRUE, the IPIDController runs in normal auto mode.
When Input Auto is FALSE, it causes reset R to track (F-GE) forcing the IPIDController Output to track the Feedback within the IPIDController limits at which time the controller switches back to auto without incrementing the Output.
IPIDController function block operation
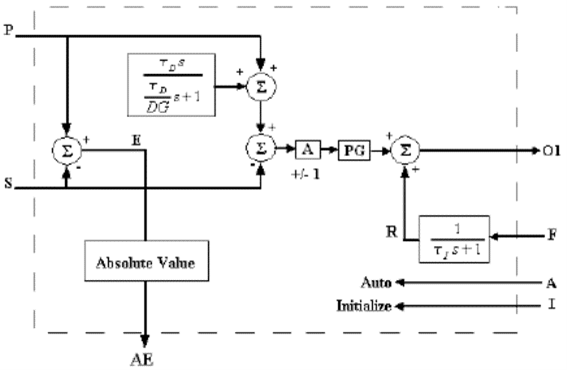
For Input Initialize, changing from FALSE to TRUE or TRUE to FALSE when AutoTune is FALSE causes the IPIDController to eliminate any proportional gain action during that cycle (for example, Initialize). Use this process to prevent bumping the Output when changes are made to the SetPoint using a switch function block.
To run an AutoTune sequence, the input ATParameters must be completed. The Input Gain and DirectActing parameters must be set according to the process and DerivativeGain set, (typically 0.1). The AutoTune sequence is started with the following sequence:
- Set the input Initialize to TRUE.
- Set the input Autotune to TRUE.
- Change the input Initialize to FALSE.
- Wait until the output ATWarning changes to 2.
- Transfer the values for output OutGains to input Gains.
To finalize the tuning, some fine tuning might be needed depending on the processes and needs. When setting TimeDerivative to 0.0, the IPIDController forces DerivativeGain to 1.0 then works as a PI controller.
Provide Feedback