Configure auto-tuning
Use these general steps when implementing auto-tuning using the IPIDCONTROLLER function.
Step | Description | Example |
|---|---|---|
1 | Reset SetPoint to zero. |  |
2 | Switch Auto mode to False. |  |
3 | Set Gains parameters. | 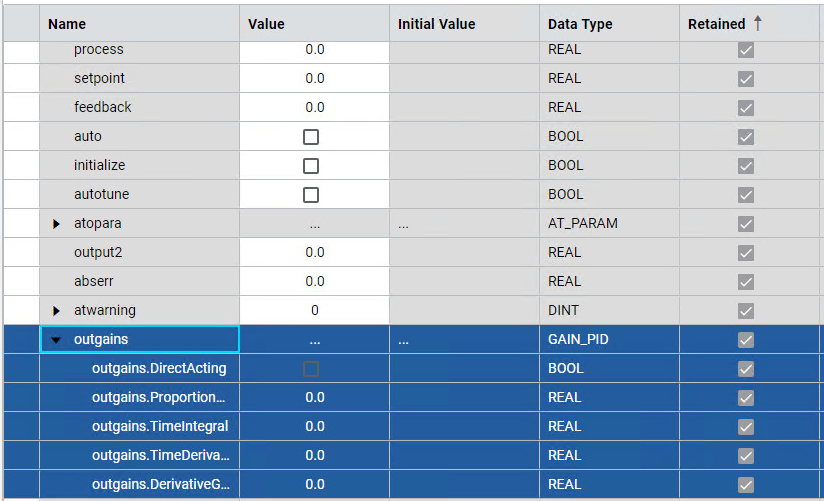 |
4 | Set AutoTune parameters. | 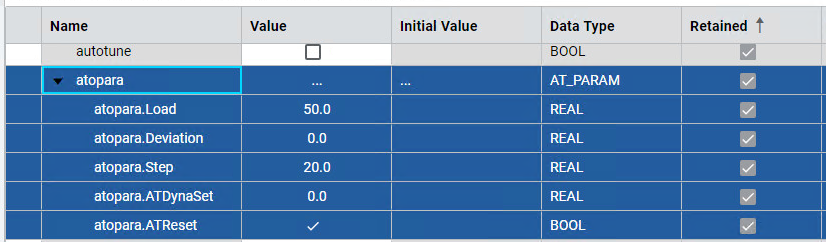 |
5 | Set Initialize and AutoTune to True. |  |
6 | Notice the Output changes to the value of Load when you set AutoTune to True. | 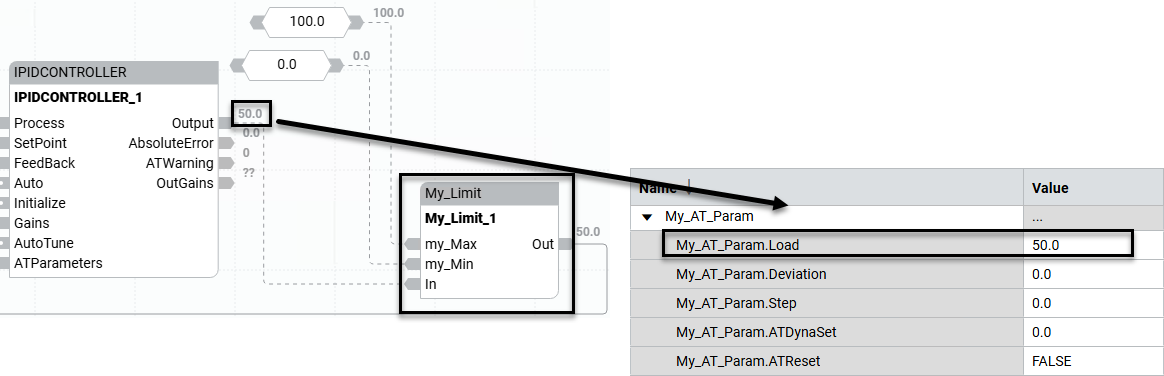 |
7 | Observe the process value rises quickly until it gets closer to its saturation point. |  |
8 | Observe the stabilization of the process value and its fluctuation. |   |
9 | Set the deviation. | 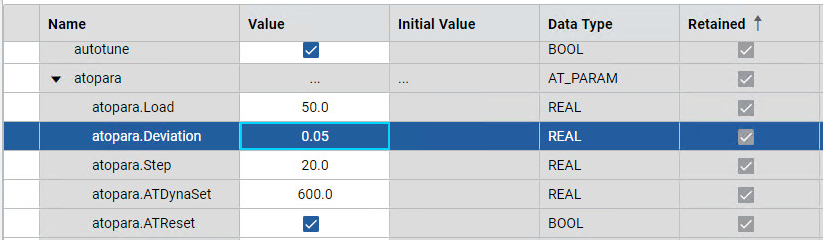 |
10 | Set Initialize to False. |  |
11 | Controller starts auto-tuning. Wait for ATWarning to become 2. | 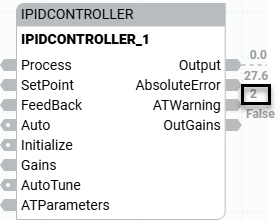 |
12 | Set AutoTune to False. |  |
13 | Observe the tuned values appear in OutGains. | 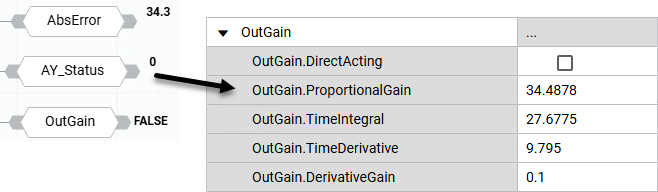 |
14 | Transfer parameter from OutGain to My_Gains. | 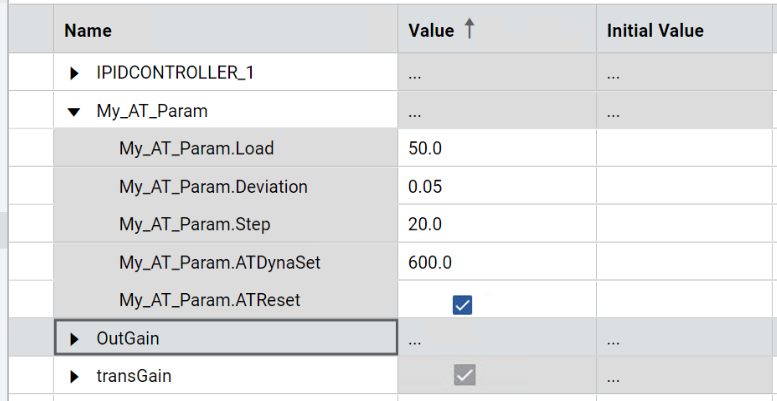 |
15 | Observe the controller is updated with the with the tuned gain parameter. | 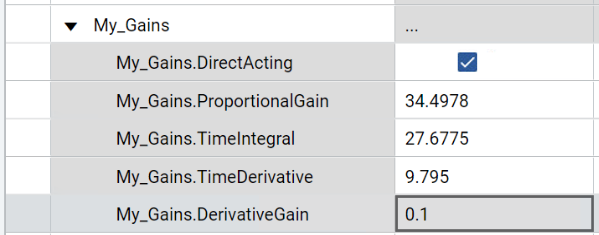 |
Provide Feedback