MC_Stop (motion control stop)
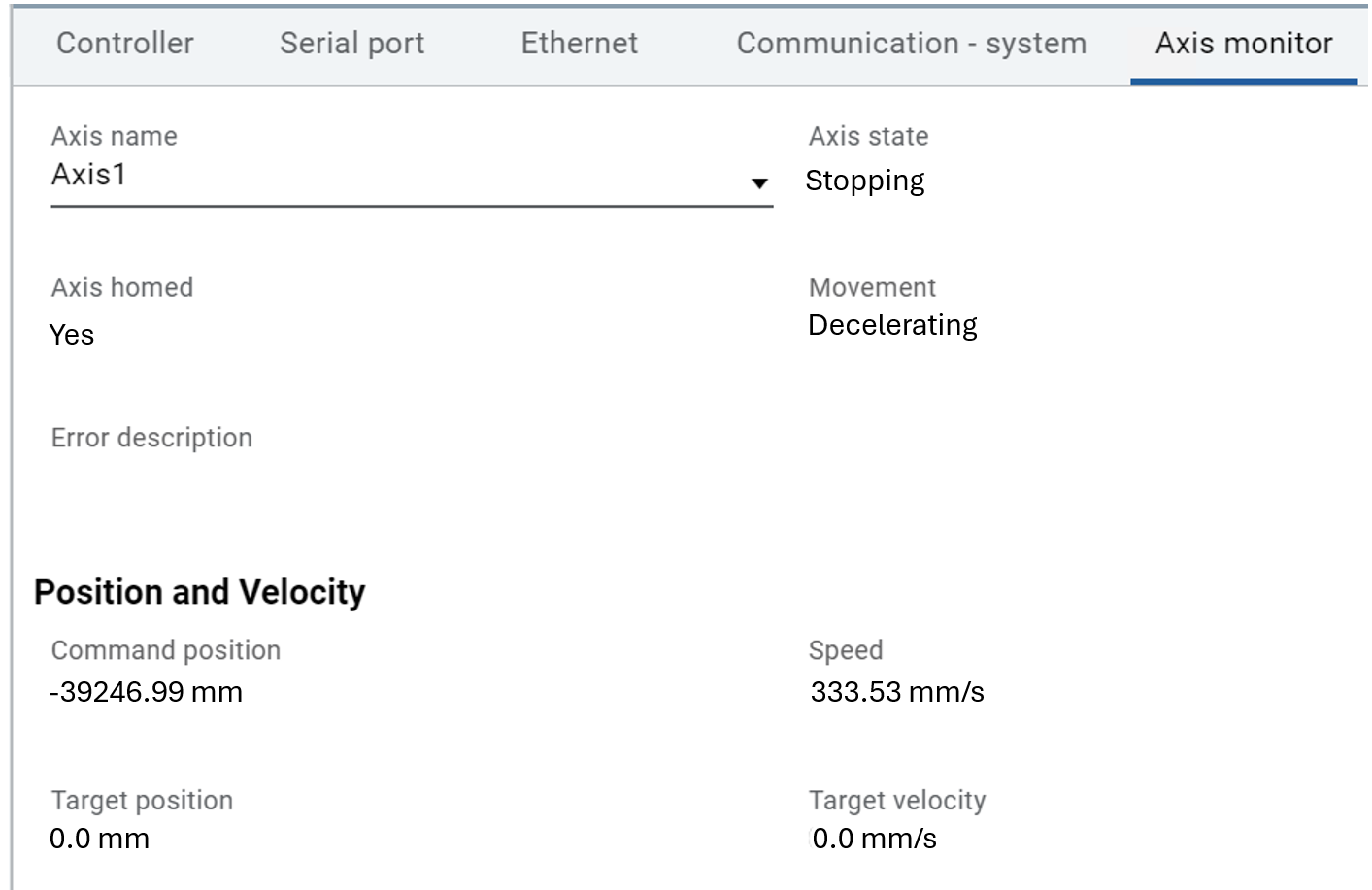
The MC_Stop instruction commands a controlled motion stop and transfers the axis state to Stopping. Any ongoing function block execution is canceled. All function block move commands are ignored until the axis state transitions to Standstill.
Operation details:
- As long as the Execute input is high, the axis remains in the Stopping state. While the axis is in the Stopping state, other motion function blocks cannot perform any motion on the same axis.
- If Deceleration equals zero, the MC_Stop parameters are determined by the Axis configuration Emergency Stop setting, including E-Stop type, E-stop Deceleration and E-stop Jerk.
- When there are no errors detected during the stop sequence, the axis state transitions to Standstill after the Done bit is SET and the Execute input changes to False.
- Use MC_Stop for emergency stop functionality or exception situations. Use MC_Halt for normal motion stops.
Languages supported: Function block diagram, ladder diagram, structured text.
This instruction applies to the L50E and L70E controllers that support motion control.
MC_Stop
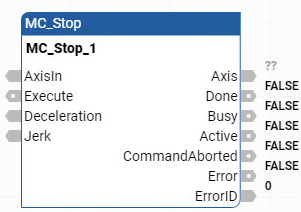
Parameter | Parameter Type | Data Type | Description |
|---|---|---|---|
EN | Input | BOOL | Instruction block enable.
Applies only to ladder diagram programs. |
AxisIn | Input | AXIS_REF | Use the AXIS_REF data type to define the parameters for AxisIn. |
Execute | Input | BOOL |
|
Deceleration | Input | REAL | Value of the deceleration [u/s 2 ]. |
Jerk | Input | REAL | Value of the Jerk [u/s 3 ]. |
ENO | Output | BOOL | Enable output. Applies only to ladder diagram programs. |
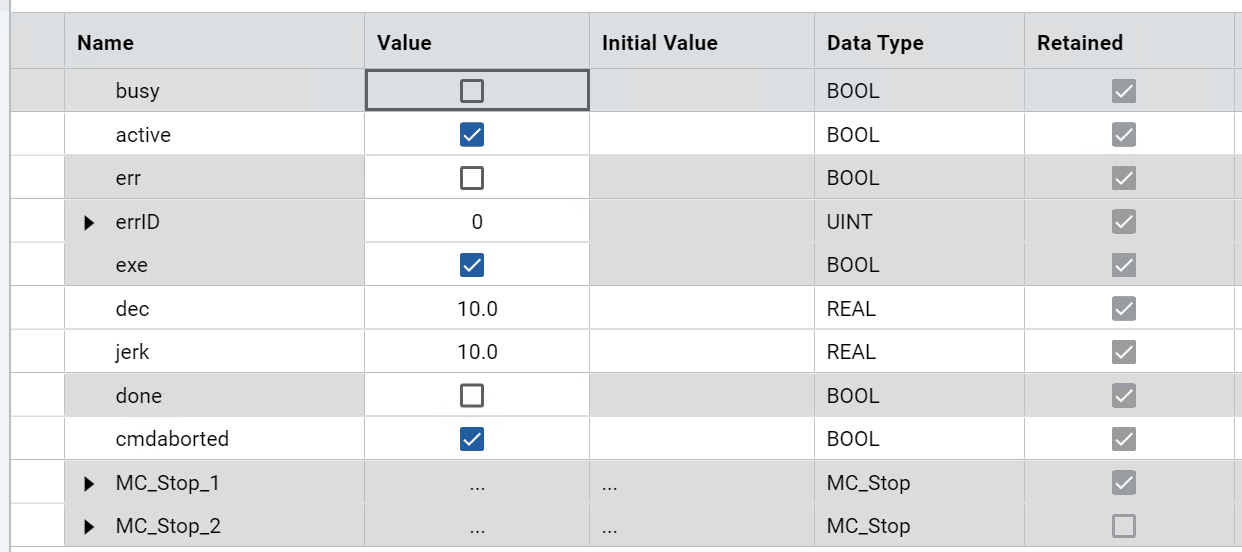
Done | Output | BOOL | TRUE: Zero velocity was reached, without error during the stop sequence. |
Busy | Output | BOOL | TRUE: The function block is not finished. |
Active | Output | BOOL | TRUE: Indicates that the function block has control on the axis. |
CommandAborted | Output | BOOL | TRUE: Command was overridden by MC_Power(OFF) function block, or Error Stop. |
Error | Output | BOOL | Indicates that an error occurred.
|
ErrorID | Output | UINT | A unique numeric that identifies the error. The errors for this instruction are defined in Motion control function block error IDs. |
MC_Stop examples
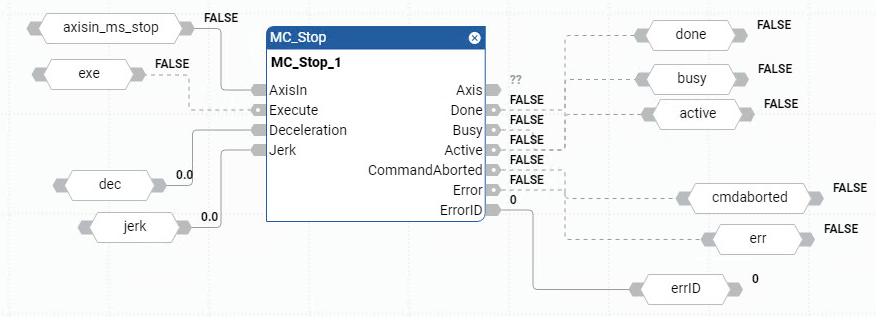
MC_Stop function block diagram example
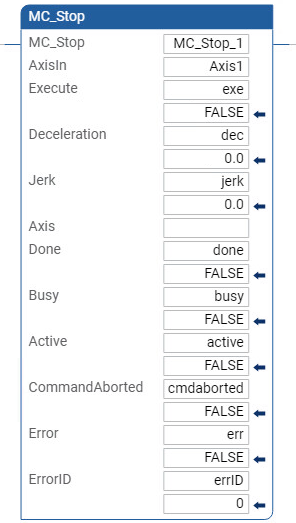
MC_Stop ladder diagram example
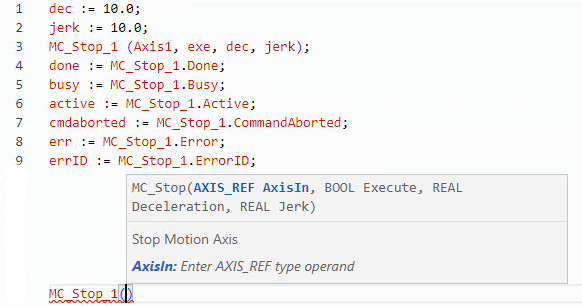
MC_Stop structured text example
Results
Provide Feedback