MC_MoveVelocity (motion control move velocity)
The MC_MoveVelocity instruction commands a never-ending controlled motion at a specified velocity.
Operation details:
- If the DirectionIn input for MC_MoveVelocity is equal to 0 and:
- The axis is in a moving state, the sign of the Velocity input is ignored, the axis continues to move in its current direction, and new dynamic parameters are applied.
- The axis is not in a moving state, MC_MoveVolecity reports an error.
- If the PTO Pulse limit is reached during execution of MC_MoveVelocity, the PTO Accumulator value is rolled over to 0 (or to the opposite soft limit if the limit is activated) and execution continues.
- If the axis is in a moving state, and MC_MoveVelocity issues a motion in which the direction (the sign of Velocity * Direction) is the opposite of the current motion direction, the MC_MoveVelocity reports an error.
- Once the signal "InVelocity" is set, it indicates MC_MoveVelocity is complete. Any subsequent motion event has no effect on the MC_MoveVelocity outputs except the signal "InVelocity".
- The InVelocity output of MC_MoveVelocity stays True once the Velocity of the axis reaches the commanded Velocity or until MC_MoveVelocity is stopped.
- The sign of (Velocity * Direction) determines the motion direction for MC_MoveVelocity. If the Velocity sign and the Direction sign are the same, positive motion is issued. If the Velocity sign and the Direction sign are different, negative motion is issued.
- The signal "InVelocity" is reset when MC_MoveVelocity is overridden by another function block or Motion event, or at the falling edge of "Execute".
- To stop or change the motion initiated by MC_MoveVelocity, the instruction block must be interrupted or overridden by another instruction block, which includes executing MC_MoveVelocity again with different parameters.
- If MC_MoveVelocity is issued with the axis state in Standstill (not controlled by another function block) and a function block error occurs, the axis state goes to Error Stop.
Languages supported: Function block diagram, ladder diagram, structured text.
This instruction applies to the L50E and L70E controllers that support motion control.
MC_MoveVelocity
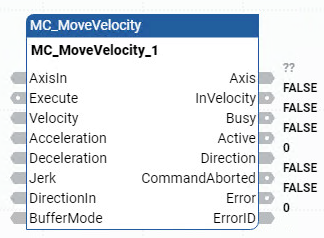
Parameter | Parameter Type | Data Type | Desscription |
|---|---|---|---|
EN | Input | BOOL | Instruction block enable.
Applies only to ladder diagram programs. |
AxisIn | Input | AXIS_REF | Use the AXIS_REF data type parameters to define AxisIn. |
Execute | Input | BOOL | Indicates when to start motion.
|
Velocity | Input | REAL | Value of the maximum velocity [u/s]. |
Acceleration | Input | REAL | Value of the acceleration (increasing energy of the motor) [u/s 2 ] |
Deceleration | Input | REAL | Value of the deceleration (decreasing energy of the motor) [u/s 2 ] |
Jerk | Input | REAL | Value of the Jerk [u/s 3 ] |
DirectionIn | Input | SINT | The valid values are: -1, 0, 1. |
BufferMode | Input | SINT | This parameter is not used. |
ENO | Output | BOOL | Enable output. Applies only to ladder diagram programs. |
InVelocity | Output | BOOL | TRUE: Commanded velocity was reached (first time). |
Busy | Output | BOOL |
|
Active | Output | BOOL | TRUE: Indicates that the function block has control on the axis. |
Direction | Output | SINT | The valid values are: -1, 0, 1. |
CommandAborted | Output | BOOL | TRUE: Command was overridden by another command, or Error Stop. |
Error | Output | BOOL | Indicates that an error occurred.
|
ErrorID | Output | UINT | A unique numeric that identifies the error. The errors for this instruction are defined in Motion control function block error IDs. |
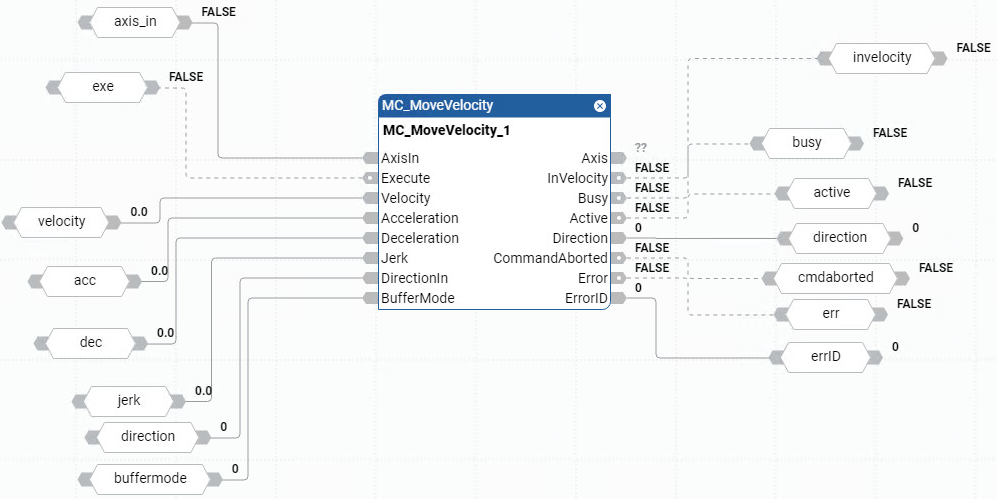
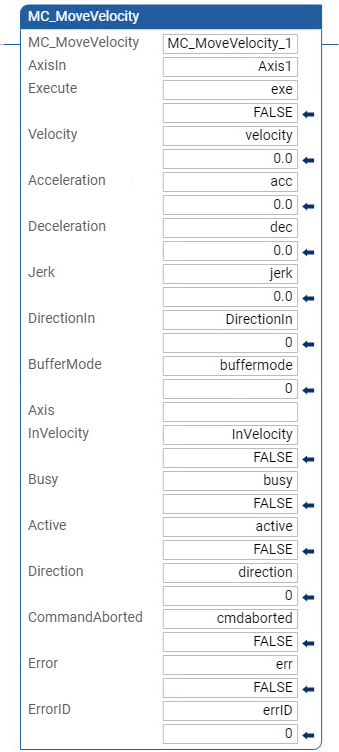
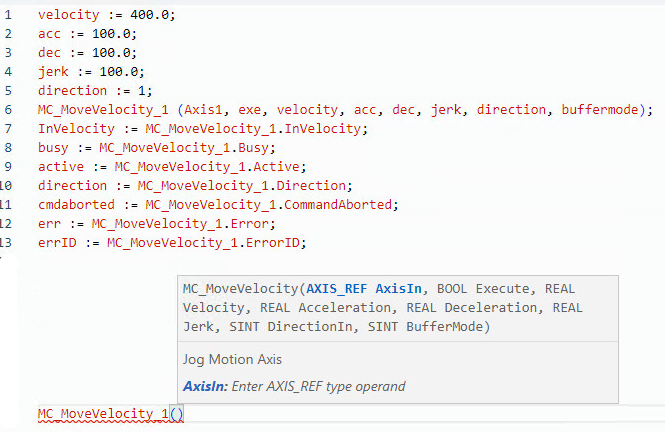
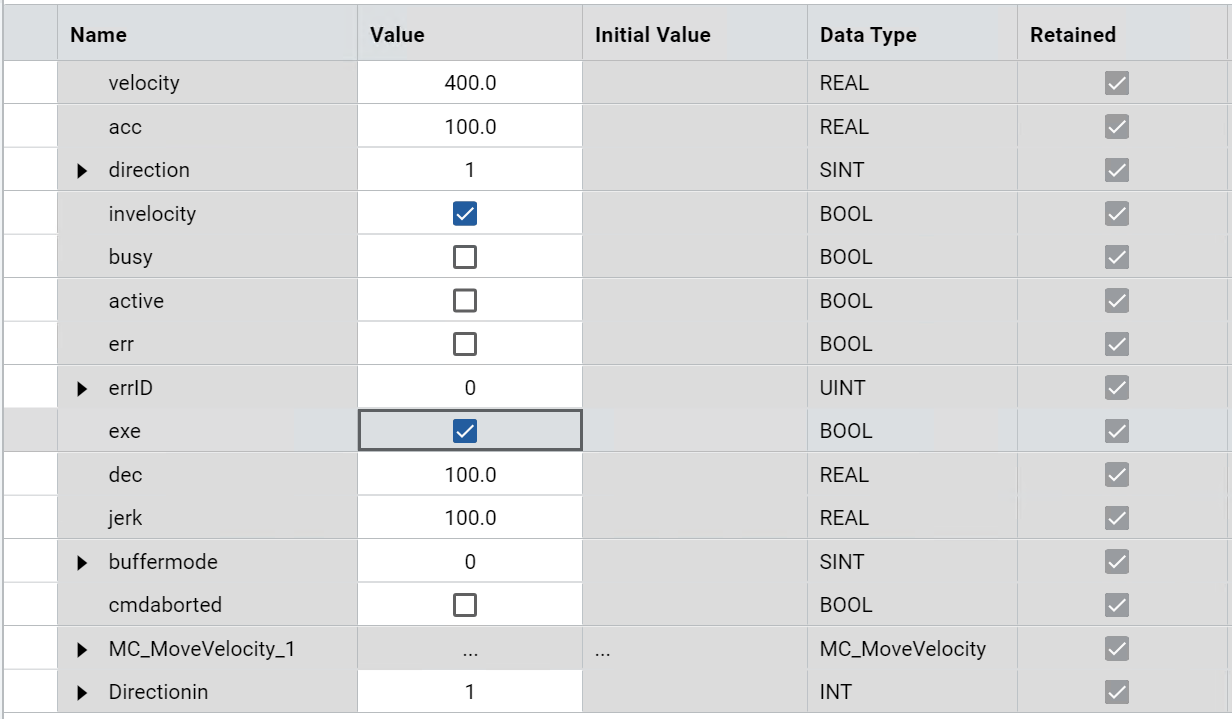
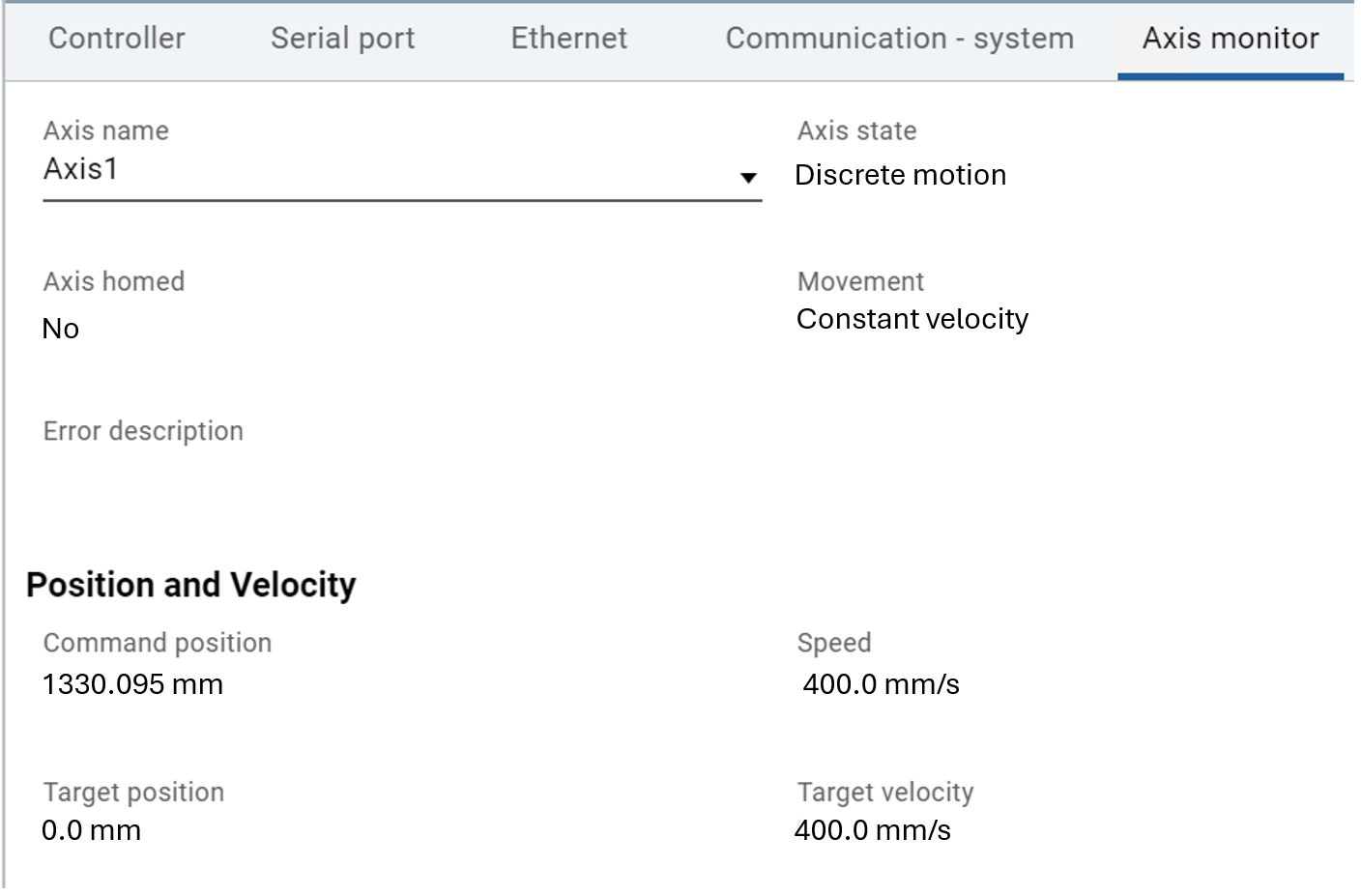
MC_MoveVelocity examples
MC_MoveVelocity function block diagram example
MC_MoveVelocity ladder diagram example
MC_MoveVelocity structured text example
Results
Provide Feedback