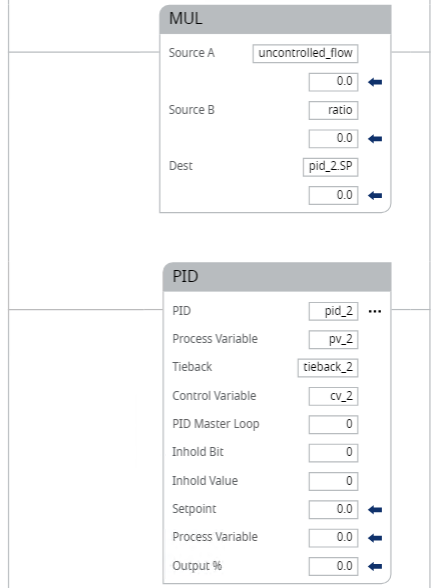
Controlling a Ratio (PID)
u can maintain two values in a ratio by using these parameters:
- Uncontrolled value
- Controlled value (the resultant setpoint to be used by the PID instruction)
- Ratio between these two values
Relay Ladder
TIP:
Tip: To avoid locking up the PID with invalid internal floating point values, ensure the PV is not INF or NAN before invoking the instruction such as:
XIC (PC_timer.DN)
MOV(Local:0:1.Ch0Data, Local:0:1.Ch0Data)
XIO(S:V)
PID(...)
For this multiplication | Enter this value |
|---|---|
Destination | Controlled value |
Source A | Uncontrolled value |
Source B | Ratio |
Provide Feedback