MC_SetPosition (motion control set position)
The MC_SetPosition instruction shifts the coordinate system of an axis by manipulating the actual position of an axis with the same value without causing any movement.
Operation details:
- MC_SetPostion can successfully complete only when the axis state is Standstill, continuous Motion (MC_ExecutionMode = 0), or when the on-going motion completes, and ends with a Standstill state (MC_ExecutionMode = 1).
- MC_SetPosition operates the same as MC_Home when the HomingMode = MC_HOME_DIRECT (0x04), except the MC_Home function block sets the Axis Homed status.
- When MC_ExecutionMode = 0 (mcImmediately), the execution of the MC_SetPosition function block reports an error if there is ongoing non-continuous motion with the axis.
- When MC_ExecutionMode = 1 (mcQueued), the actual position setting occurs only when all previous ongoing motion stops. That is, each previous function block must have at least one of the Done, Aborted, or Error outputs equal to True.
Languages supported: Function block diagram, ladder diagram, structured text.
This instruction applies to the L50E and L70E controllers that support motion control.
MC_SetPosition
Parameter | Parameter Type | Data Type | Description |
|---|---|---|---|
EN | Input | BOOL | Instruction block enable.
Applies only to ladder diagram programs. |
AxisIn | Input | AXIS_REF FB_AXIS_REF | Use the AXIS_REF data type to define AxisIn. For FB_Axis (feedback axis), use the FB_AXIS_REF data type to define AxisIn. |
Execute | Input | BOOL | TRUE: Starts setting the axis position. |
Position | Input | REAL | The absolute position or relative distance to be set for the axis. |
Relative | Input | BOOL |
|
MC_ExecutionMode | Input | SINT | Values are:
For (MC_ExecutionMode = 0), this function block successfully completes when the axis state is Disabled or Standstill. The execution of this function block reports an error if there is an ongoing non-Continuous motion with the axis in this mode. For (MC_ExecutionMode = 1), this function block successfully completed when the axis state is Disabled, Standstill, or the ongoing motion can complete, ending with a Standstill state. Other input values are reserved currently, and are considered as invalid parameters. |
ENO | Output | BOOL | Enable output. Applies only to ladder diagram programs. |
Axis | Output | AXIS_REF | Axis output is read-only in ladder diagram programs. |
Done | Output | BOOL | TRUE: The Position has new value. |
Busy | Output | BOOL | TRUE: The function block is not finished. |
Error | Output | BOOL | Indicates that an error occurred.
|
ErrorID | Output | UINT | A unique numeric that identifies the error. The errors for this instruction are defined in Motion control function block error IDs. |
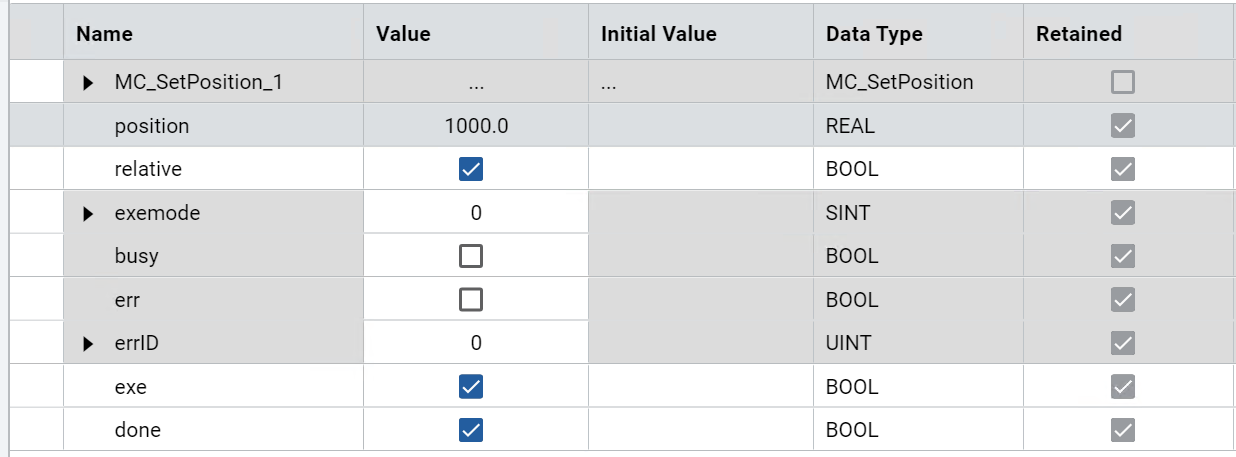
MC_SetPosition examples
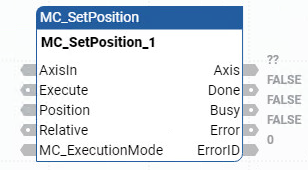
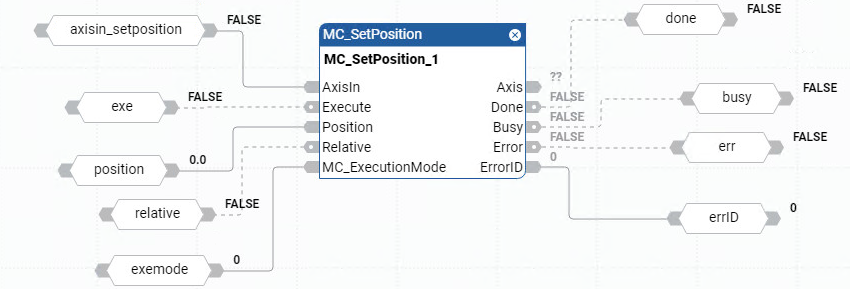
MC_SetPosition function block diagram example
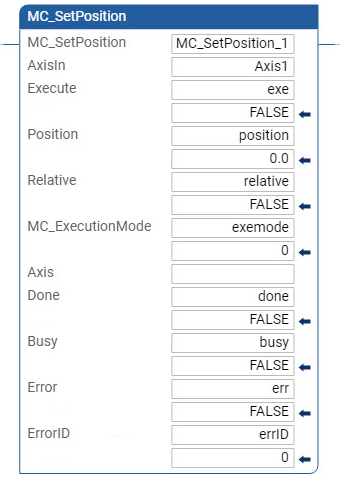
MC_SetPosition ladder diagram example
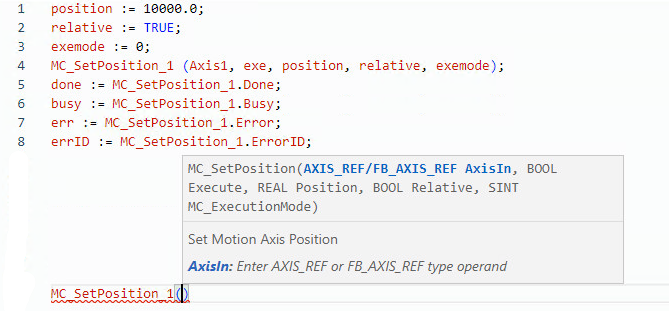
MC_SetPosition structured text example
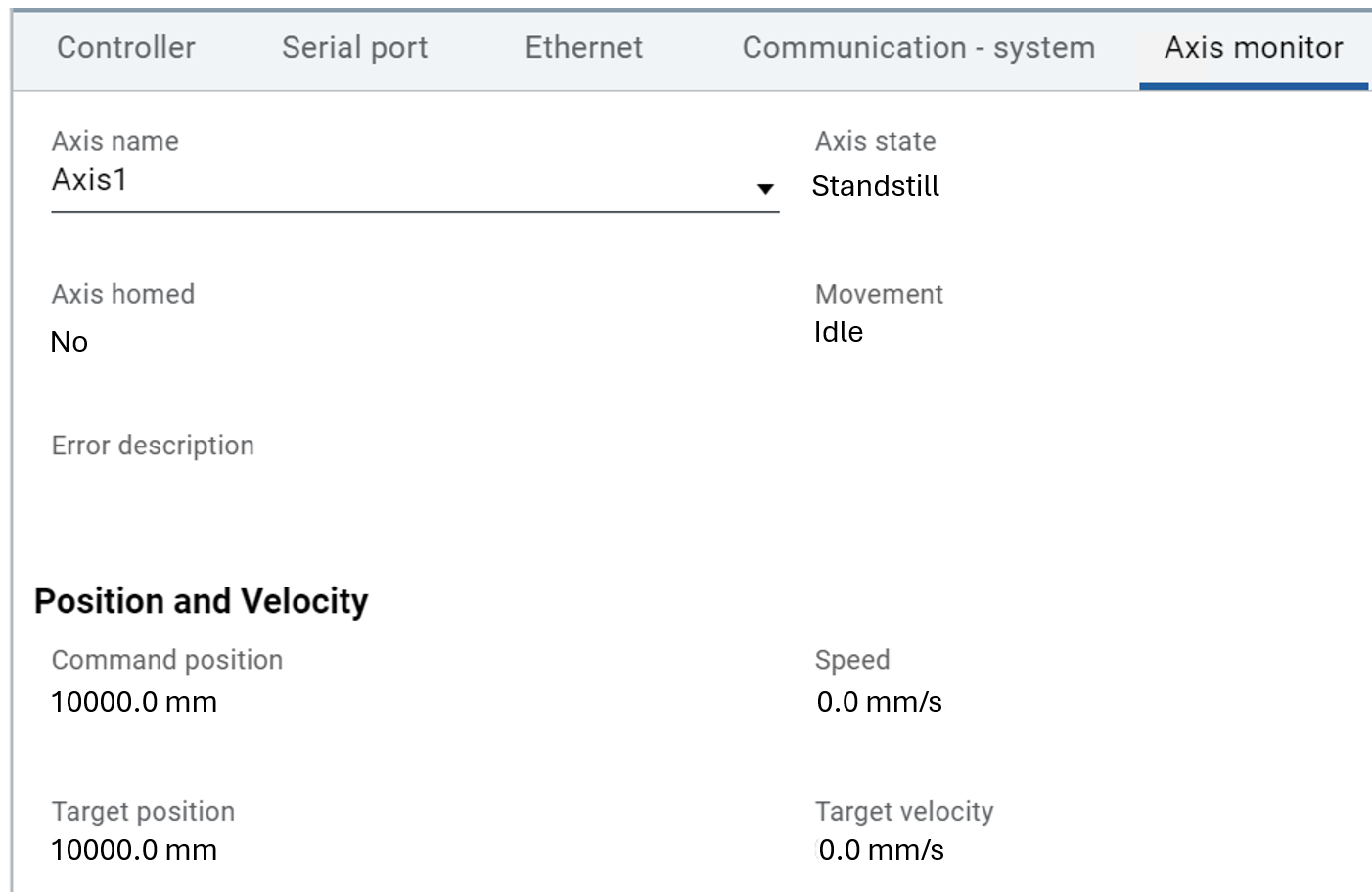
Results
Provide Feedback