MC_Home (motion control home)
The MC_Home instruction commands the axis to perform the
<search home>
sequence. The details of this sequence are manufacturer dependent and can be set by the axis parameters. The Position input is used to set the absolute position when a reference signal is detected, and the configured Home offset is reached.Operation details:
- After MC_Power is issued, the axis Homed status is reset to 0 (not homed). In most cases, after the axis is powered on, the MC_Home function block needs to be executed to calibrate the axis position and the Home reference.
- The MC_Home function block can only be canceled using a MC_Stop or a MC_Power function block. If it is canceled before it completes, the previously searched Home position is considered not valid and the axis Homed status is cleared.
Languages supported: Function block diagram, ladder diagram, structured text.
This instruction applies to the L50E and L70E controllers that support motion control.
MC_Home
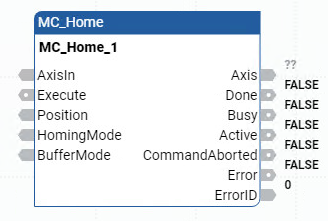
Parameter | Parameter Type | Data Type | Description |
|---|---|---|---|
EN | Input | BOOL | Instruction block enable.
Applies only to ladder diagram programs. |
AxisIn | Input | AXIS_REF | Use the AXIS_REF data type parameters to define AxisIn. |
Execute | Input | BOOL | Indicates when to start motion.
|
Position | Input | REAL | Absolute position is set when the reference signal is detected and configured Home offset is reached. The value range for this input is -0x40000000 – 0x40000000 physical pulse after the position is converted from user position unit to PTO pulse. Set the Position value within the Soft Limit. An invalid input value results in an error. Error ID = MC_FB_ERR_PARAM. |
HomingMode | Input | SINT | Enum input for Homing mode. |
BufferMode | Input | SINT | Not used. The mode is always mcAborting. |
ENO | Output | BOOL | Enable output. Applies only to ladder diagram programs. |
Done | Output | BOOL |
|
Busy | Output | BOOL |
|
Active | Output | BOOL | TRUE: Indicates that the instruction block has control on the axis. |
CommandAborted | Output | BOOL | TRUE: Command was overridden by another command, or error stop. |
Error | Output | BOOL | Indicates an error occurred.
|
ErrorID | Output | UNIT | A unique numeric that identifies the error. The errors for this instruction are defined in Motion control function block error IDs . |
Value | Name | Description |
|---|---|---|
0x00 | MC_HOME_ABS_SWITCH | Homing process by searching Home Absolute switch. |
0x01 | MC_HOME_LIMIT_SWITCH | Homing process by searching limit switch. |
0x02 | MC_HOME_REF_WITH_ABS | Homing process by searching Home Absolute switch plus using encoder reference pulse. |
0x03 | MC_HOME_REF_PULSE | Homing process by searching limit switch plus using encoder reference pulse. |
0x04 | MC_HOME_DIRECT | Static homing process with direct forcing a home position from user reference. The function block will set current position the mechanism is in as home position, with its position determined by the input parameter "Position". |
MC_Home examples
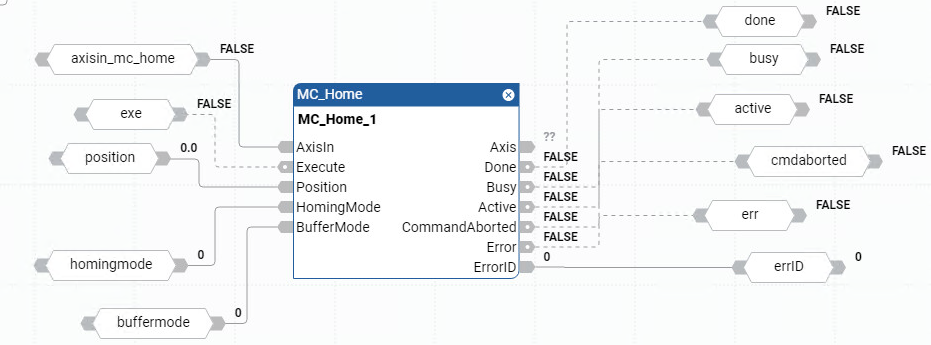
MC_Home function block diagram example
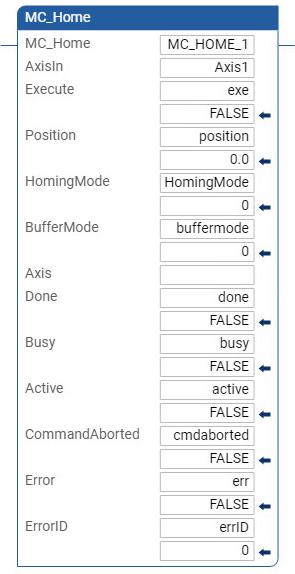
MC_Home ladder diagram example
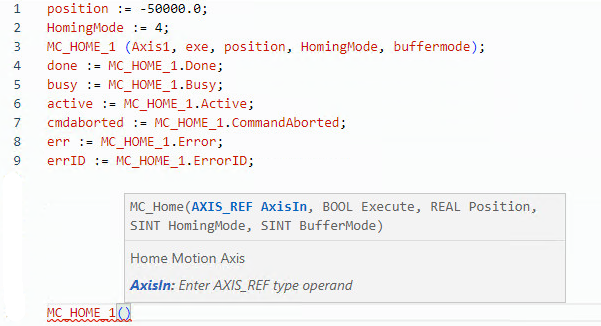
MC_Home structured text example
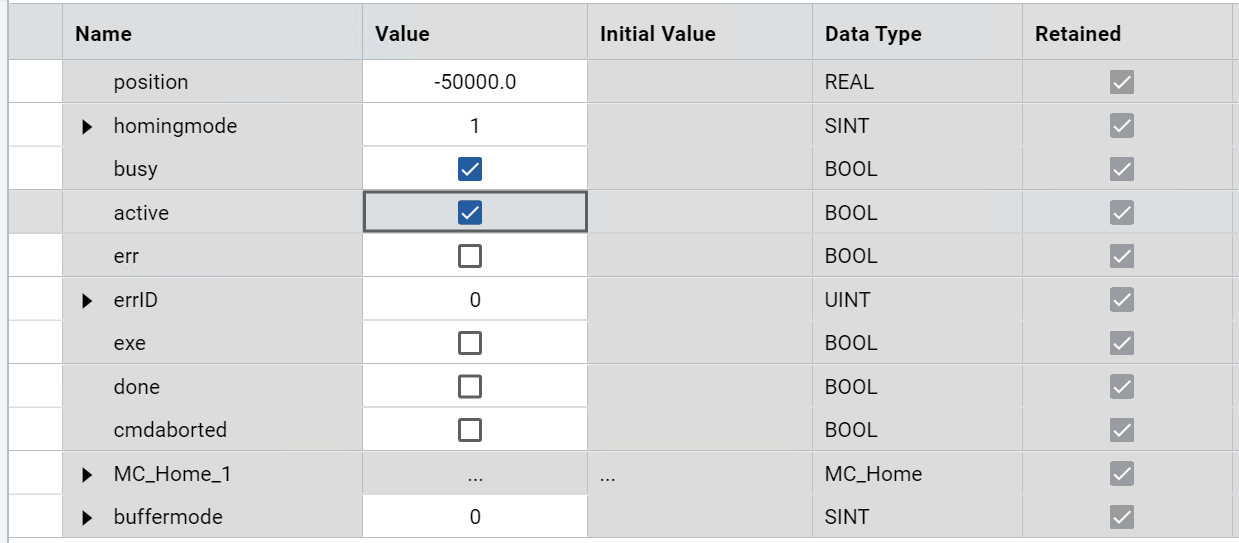
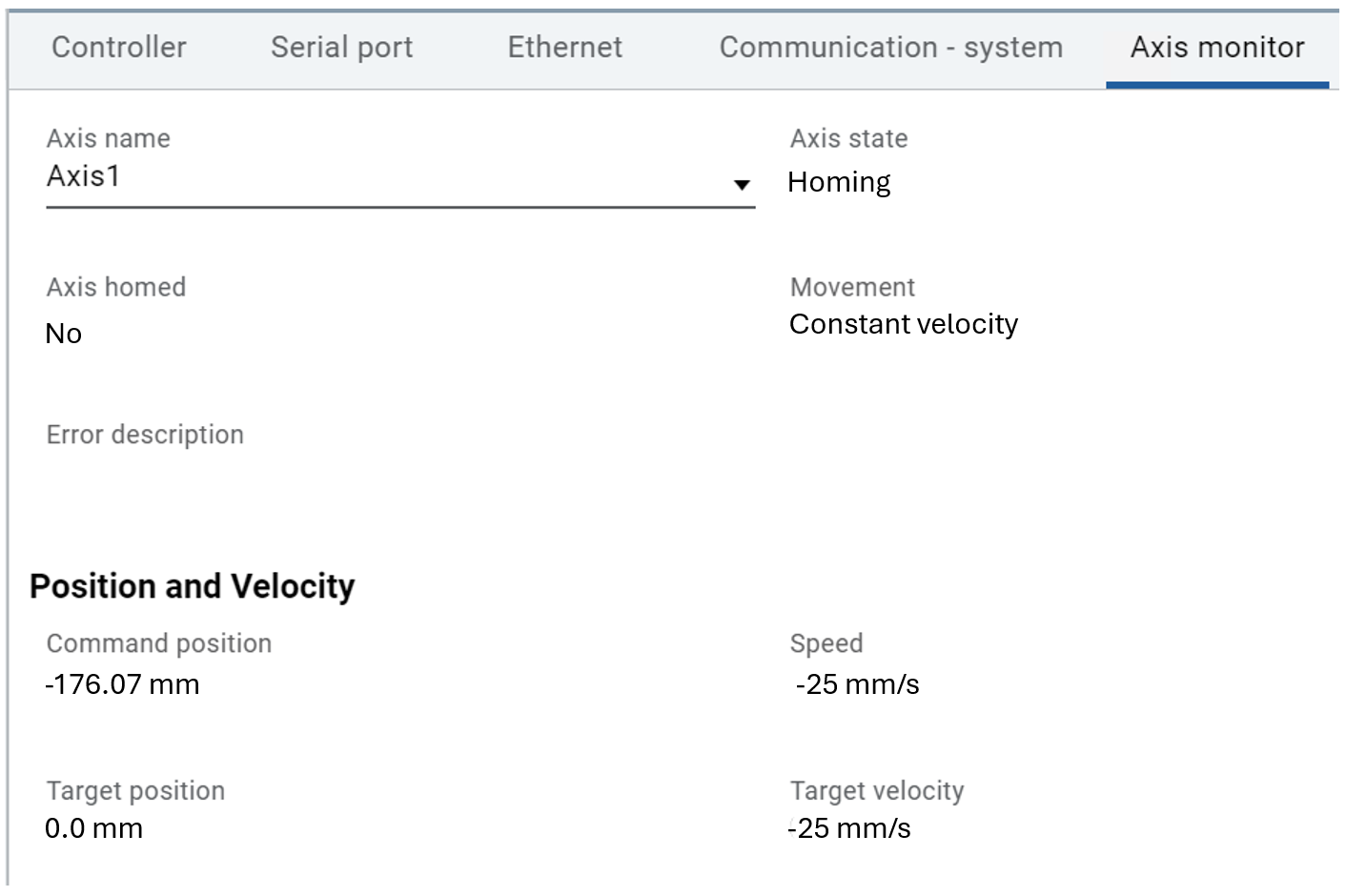
Results
Provide Feedback