MC_Halt (motion control halt)
The MC_Halt instruction commands a controlled motion stop under normal operating conditions.
Operating details:
- The axis state changes to Discrete Motion, until the velocity is zero. When velocity reaches zero, Done is set to True and the axis state changes to Standstill.
- It is possible to execute another motion command during deceleration of the axis, which overrides MC_Halt.
- If MC_Halt is issued when the axis state is Homing, the instruction block reports an error, and the homing process is not interrupted.
Languages supported: Function block diagram, ladder diagram, structured text.
This instruction applies to the L50E and L70E controllers that support motion control.
MC_Halt
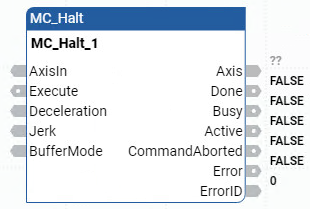
Parameter | Parameter Type | Data Type | Description |
|---|---|---|---|
EN | Input | BOOL | Instruction block enable.
Applies to ladder diagram programs. |
AxisIn | Input | AXIS_REF | Use the AXIS_REF data type parameters to define AxisIn. |
Execute | Input | BOOL | Indicates when to start motion.
Executing MC_Halt during homing, MC_Halt is set to MC_FB_ERR_STATE and the homing process continues. |
Deceleration | Input | REAL | Value of the deceleration (always positive) (decreasing energy of the motor). If Deceleration <= 0 and the axis state is not Standstill, MC_Halt is set to MC_FB_ERR_RANGE. |
Jerk | Input | REAL | Value of the Jerk (always positive). If Jerk < 0 and the axis state is Standstill, MC_Halt is set to MC_FB_ERR_RANGE. |
BufferMode | Input | SINT | Not used. The mode is always MC_Aborting. |
ENO | Output | BOOL | Enable output. Applies only to ladder diagram programs. |
Done | Output | BOOL | Zero velocity reached. |
Busy | Output | BOOL | The instruction block is not finished. |
Active | Output | BOOL | Indicates that the instruction block has control on the axis. |
CommandAborted | Output | BOOL | Command is overridden by another command, or error stop. |
Error | Output | BOOL | Indicates that an error occurred.
|
ErrorID | Output | UINT | A unique numeric that identifies the error. The errors for this instruction are defined in Motion control function block error IDs. |
MC_Halt examples
MC_Halt function block diagram example
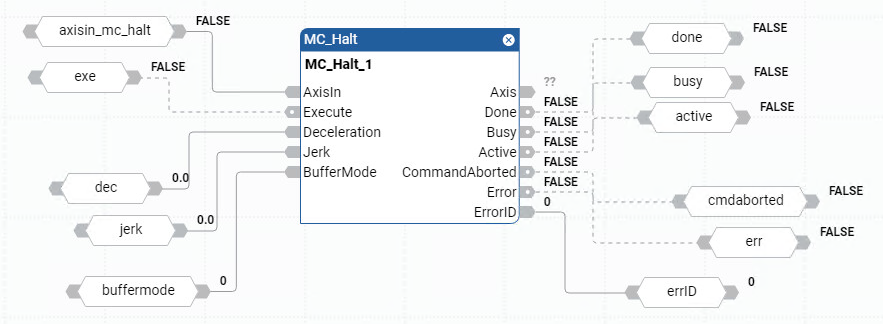
MC_Halt ladder diagram example
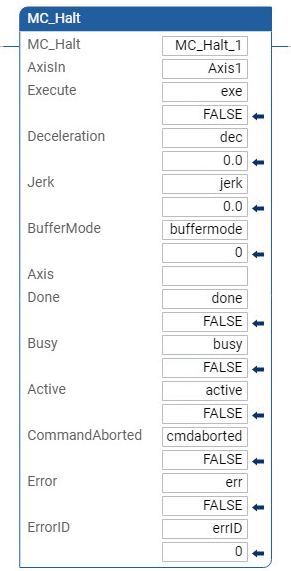
MC_Halt structured text example

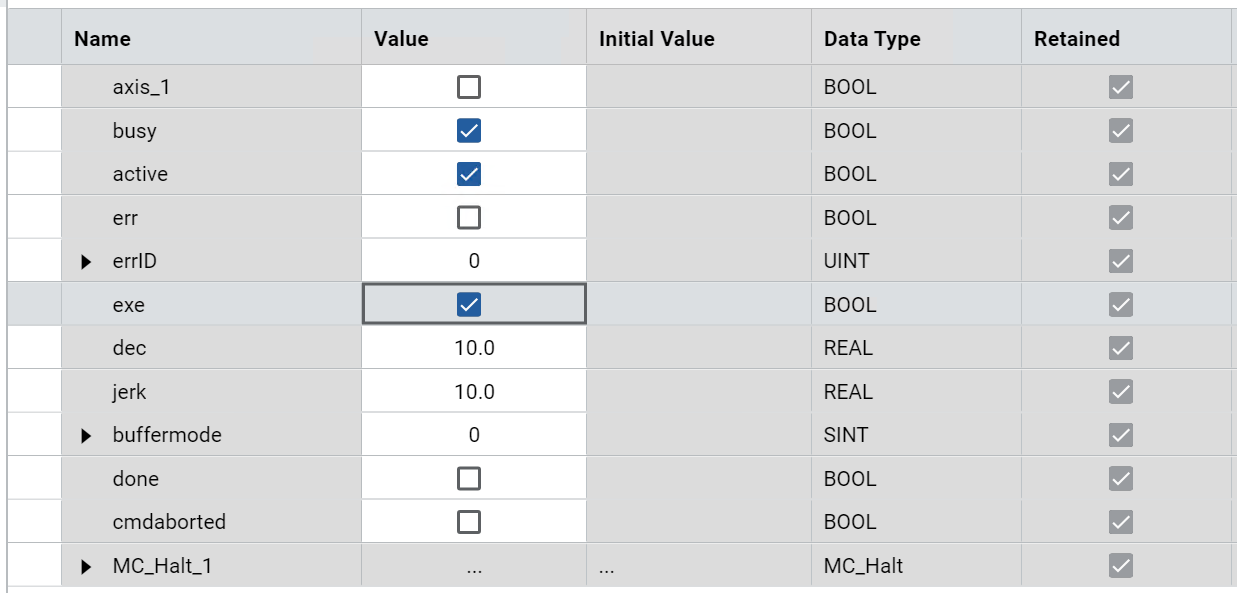
Results
Provide Feedback