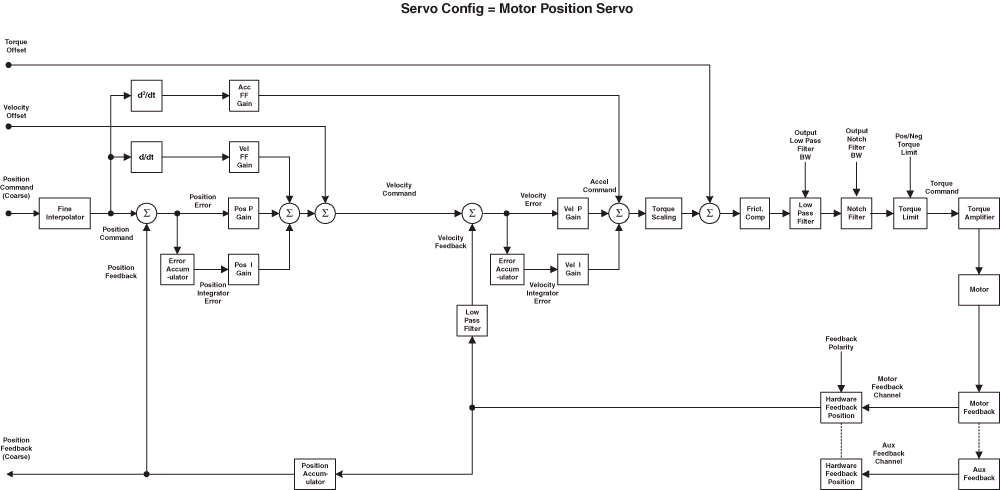
Motor Position Servo Loop (AXIS_SERVO_DRIVE)
The Motor Position Servo configuration provides full position servo control using only the motor mounted feedback device to provide position and velocity feedback.
This servo configuration is a good choice in applications where smoothness and stability are more important than positioning accuracy. Positioning accuracy is limited due to the fact that the controller has no way of compensating for non-linearity in the mechanics external to the motor. Note that the motor mounted feedback device also provides motor position information necessary for commutation. Synchronous input data to the servo loop includes Position Command, Velocity Offset, and Torque Offset. These values are updated at the coarse update rate of the associated motion group. The Position Command value is derived directly from the output of the motion planner, while the Velocity Offset and Torque Offset values are derived from the current value of the corresponding attributes. These offset attributes may be changed programmatically via SSV instructions or direct Tag access which, when used in conjunction with future Function Block programs, provides custom "outer" control loop capability.
Provide Feedback