Active Control Axis Behavior Model
The Motion Control Axis Object State Model is based on elements of the S88 and Pack/ML standard state models. The current state of the Motion Control Axis Object instance is indicated by the CIP Axis State attribute (Attribute ID = 650). State transitions can be initiated either directly using the Axis Control request mechanism or by conditions that occur in either the controller or motion device during operation.
The diagram shows the basic operating states of the Motion Control Axis Object when actively controlling axis motion (Control Mode != No Control) or, in the case of a regenerative converter (G), when actively controlling power, or in the case of a track section (X), when actively controlling current for resident movers. Shaded regions show mapping of Axis States to corresponding Identity Object states. State transitions ending on shaded boxes can transition to any axis state within the box.
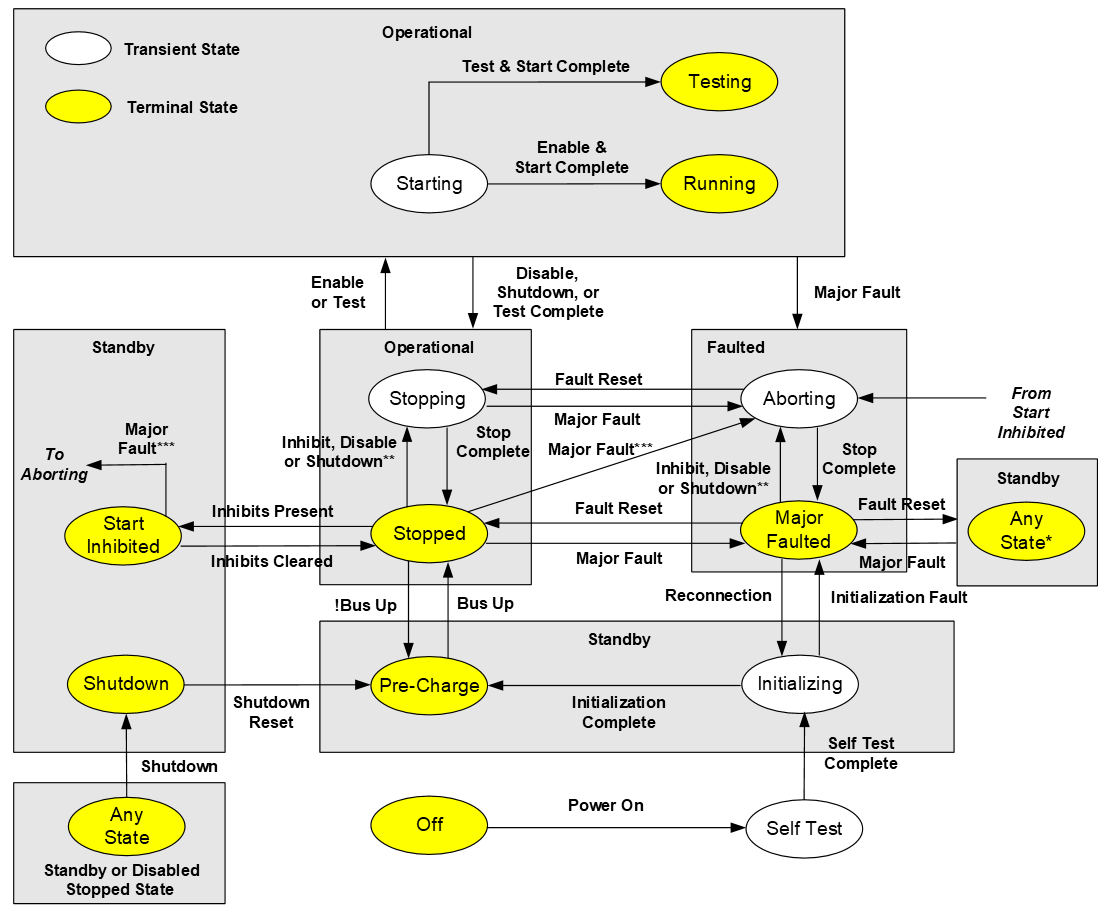
TIP:
* Specific Standby State after a Fault Reset is determined by applying Fault Reset
State Transition Precedence rules defined at the end of this section.
** When an axis is in the Stopped or Major Faulted states with Holding torque (as a
result of a Category 2 Stop), the following events will transition the axis to either
the Stopping or Aborting state. A Start Inhibit condition executes the configured stop
action from the Stopping Action but always forces a power structure final state of
disabled. A Disable Request executes the configured Stopping Action which shall leave
the axis power structure in either the active hold or disabled condition. A Shutdown
Request immediately executes a coast stop, disables the inverter power structure, and
may execute the configured Shutdown Action if supported.
*** When an axis in the Start Inhibited state experiences removal of all Start Inhibits
and assertion of the Brake Slip exception that is configured as a major fault, the axis
enables and transitions to the Aborting state. It executes the configured Brake Slip
Exception Fault Action. Similarly, when an axis in the Stopped state without holding
torque (PS=0) experiences assertion of the Brake Slip Exception that is configured as a
major fault, the axis enables and transitions to the Aborting state. It executes the
configured Brake Slip Exception Fault Action.
Valid transitions for the Axis State Model are defined in the following table:
Current State | Event | Conditions | Next State |
|---|---|---|---|
Off | Power Up | Self Test | |
Self Test | Self Test Complete | Initializing | |
Initializing | Initialization Fault | Major Faulted | |
Initializing | Initialization Complete | Pre-Charge | |
Shutdown | Major Fault | Major Faulted | |
Pre-Charge | Shutdown | Shutdown | |
Pre-Charge | Major Fault | Major Faulted | |
Pre-Charge | Bus Up | Stopped | |
Start Inhibited | Shutdown | Shutdown | |
Start Inhibited | Major Fault | Major Faulted | |
Start Inhibited | Brake Slip Exception Major Fault*** | Start Inhibit = 0 | Aborting |
Start Inhibited | Inhibits Cleared | Stopped | |
Major Faulted | Shutdown** | Power Structure Enabled = 1 | Aborting |
Major Faulted | Disable** | Power Structure Enabled = 1 | Aborting |
Major Faulted | Start Inhibit** | Power Structure Enabled = 1 | Aborting |
Major Faulted | Fault Reset | Shutdown = 1 | Shutdown |
Major Faulted | Fault Reset | Shutdown = 0 DC Bus Up = 0 | Pre-Charge |
Major Faulted | Fault Reset | Shutdown = 0 DC Bus Up = 1 Start Inhibit > 0 | Start Inhibited |
Major Faulted | Fault Reset | Shutdown = 0 DC Bus Up = 1 Start Inhibit = 0 | Stopped |
Major Faulted | Reconnection | Initializing | |
Stopped | Shutdown** | Power Structure Enabled = 1 | Stopping |
Stopped | Disable** | Power Structure Enabled = 1 | Stopping |
Stopped | Start Inhibit** | Power Structure Enabled = 1 | Stopping |
Stopped | Start Inhibit | Power Structure Enabled = 0 | Start Inhibit |
Stopped | Not Bus Up | Pre-Charge | |
Stopped | Shutdown | Shutdown | |
Stopped | Major Fault | Major Faulted | |
Stopped | Brake Slip Exception Major Fault*** | Power Structure Enabled = 0 | Aborting |
Stopped | Major Fault | Power Structure Enabled = 1 | Aborting |
Stopped | Enable | Starting | |
Stopped | Test (Active) | Starting | |
Starting | Shutdown | Shutdown | |
Starting | Major Fault | Aborting | |
Starting | Disable | Stopping | |
Starting | Start Complete | In Process = 0 | Running |
Starting | Start Complete | In Process = 1 | Testing |
Stopping | Stop Complete | Shutdown = 0 | Stopped |
Stopping | Stop Complete | Shutdown = 1 | Shutdown |
Stopping | Major Fault | Aborting | |
Stopping | Enable | Flying Start Enable = 1 | Starting |
Aborting | Stop Complete | Major Faulted | |
Aborting | Fault Reset | Stopping | |
Testing | Shutdown | Stopping | |
Testing | Major Fault | Aborting | |
Testing | Disable | Stopping | |
Testing | Test Complete | Stopping | |
Running | Shutdown | Stopping | |
Running | Major Fault | Aborting | |
Running | Disable | Stopping | |
Any State | Connection Close | Initializing | |
Any State | Connection Loss | Major Faulted | |
** When an axis is in the Stopped or Major Faulted states with Holding torque
(as a result of a Category 2 Stop), the axis transitions to either the Stopping
or Aborting state. A Start Inhibit condition executes the configured stop action
from the Stopping Action but always forces a power structure final state of
disabled. A Disable Request executes the configured Stopping Action which shall
leave the axis power structure in either the active hold or disabled condition.
A Shutdown Request immediately executes a coast stop, disables the inverter
power structure, and may execute the configured Shutdown Action if
supported. *** When an axis in the Start Inhibited state experiences removal of all Start
Inhibits and assertion of the Brake Slip exception that is configured as a major
fault, the axis enables and transitions to the Aborting state. It executes the
configured Brake Slip Exception Fault Action. Similarly, when an axis in the
Stopped state without holding torque (PS=0) experiences assertion of the Brake
Slip Exception that is configured as a major fault, the axis enables and
transitions to the Aborting state. It executes the configured Brake Slip
Exception Fault Action. | |||
Axis Test Mode
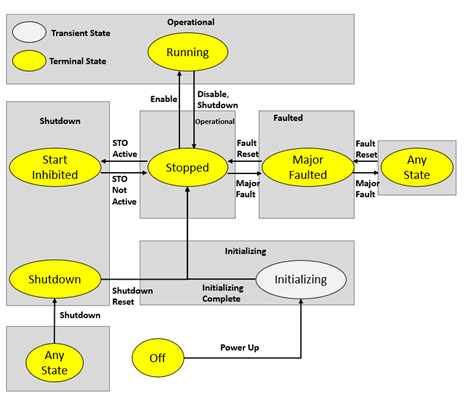
Axes with the Test Mode attribute set to Enabled and that are configured for Controller Loop Back simulate these transitions for the Axis State Model.
Current State | Event | Conditions | Next State | Axis Test Mode Support (Test Mode Configuration) |
|---|---|---|---|---|
Off | Power Up | Initializing | Controller Loop Back: V35 | |
Initializing | Initialization Complete | Stopped | Controller Loop Back: V35 | |
Stopped | Enable | Running | Controller Loop Back: V35 | |
Stopped | Shutdown | Shutdown = 1 | Shutdown | Controller Loop Back: V35 |
Stopped | STO Disable | STO Active = 1 | Start Inhibited | Controller Loop Back: V36 |
Stopped | Major Fault | Major Faulted | Controller Loop Back: V36 | |
Running | Disable | Stopped | Controller Loop Back: V35 | |
Running | Major Fault | Major Faulted | Controller Loop Back: V36 | |
Shutdown | Shutdown Reset | Shutdown = 0 STO Active = 0 | Stopped | Controller Loop Back: V35 |
Shutdown | Shutdown Reset | Shutdown = 0 STO Active = 1 | Start Inhibited | Controller Loop Back: V36 |
Shutdown | Major Fault | Major Faulted | Controller Loop Back: V36 | |
Star Inhibited | Shutdown | Shutdown | Controller Loop Back: V36 | |
Star Inhibited | Major Fault | Major Faulted | Controller Loop Back: V36 | |
Star Inhibited | STO Enable | STO Active = 0 | Stopped | Controller Loop Back: V36 |
Major Faulted | Fault Reset | Shutdown = 0 STO Active = 1 | Shutdown | Controller Loop Back: V36 |
Major Faulted | Fault Reset | Shutdown = 0 STO Active = 1 | Start Inhibited | Controller Loop Back: V36 |
Major Faulted | Fault Reset | Shutdown = 0 STO Active = 0 | Stopped | Controller Loop Back: V36 |
Provide Feedback