PID Control System Emulation for Industrial Variables
The application of a PID control system is a highly useful tool for industrial control and automation teams, enabling critical testing of key variables, systems, and processes. - [Implementation time: 60 minutes]
The purpose of this PID control system emulation application is to simulate a first-order system in the Laplace domain alongside a PID controller, enabling testing and analysis of the behavior of a variable to be controlled within a plant.
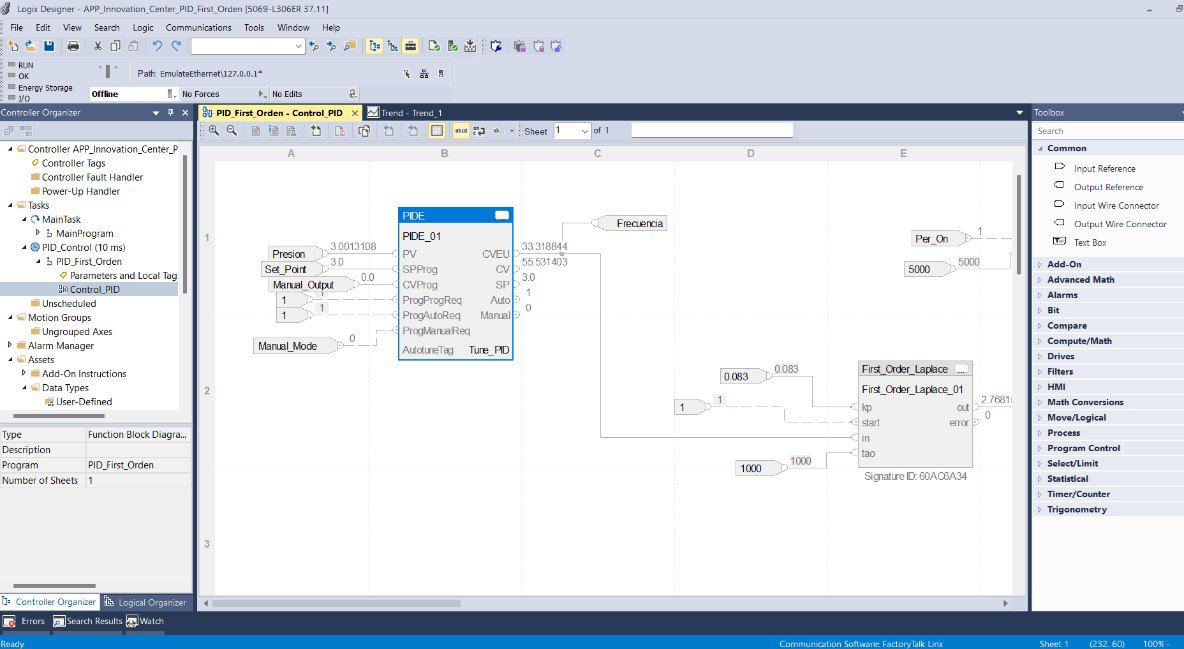
The application was developed in the Studio 5000 Logix Designer environment using Function Block language. It includes the emulation of a first-order system in the Laplace domain, its PID controller, and a disturbance environment. These components are considered the main criteria for testing control of key variables in industrial environments.
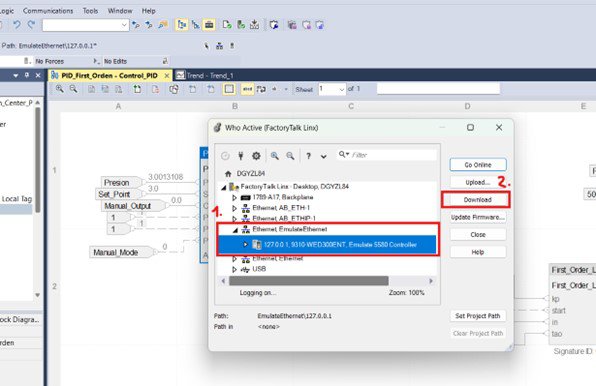
This application offers the option to operate digitally via FT Logix Echo or, alternatively, connect to a PC/Laptop and download the program to a physical controller available to the user. In this first version, the key focus is on monitoring through the graphs generated by the emulation, which display the control and process variables the user wishes to work with.
Is this useful for me?
Many industrial variables behave similarly to the system modeled in this application: Temperature, Pressure (used in the explanation and example), Speed, Level, etc. Modeling these first-order systems is practical due to their mathematical simplicity (which facilitates PID controller design), acceptable approximation tolerance, and ease of identifying parameters and coefficients.
This application has become a highly useful tool for plant control and automation teams, integrators, and other stakeholders in industrial control systems. It allows for relevant testing to determine the best way to control key variables, such as identifying how long it takes for a plant to stabilize based on the variables of each process. All of this can be done prior to on-site testing and system commissioning.
This type of application is important because users can build and adjust it to become a practical technological training tool for use with their own teams, and as a testing environment for technical concept validations that support future project development.
Downloads
Please note: You will need to agree to the Terms & Conditions for each download.
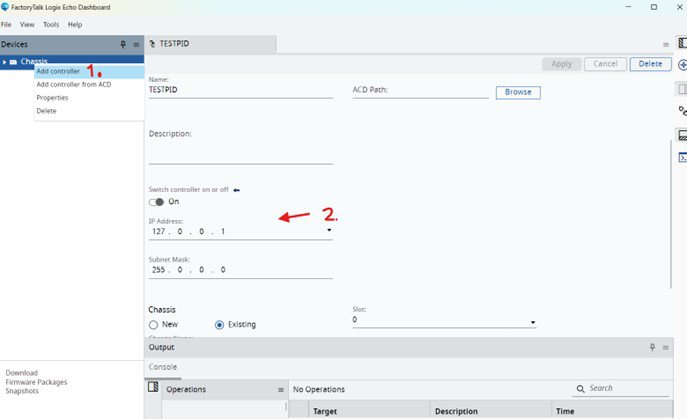
The system can be tested with a Rockwell controller connected to the Studio 5000 programming environment.
Practical Knowledge Required
Basic programming and configuration skills in Studio 5000 Logix Designer and FT Logix Echo, and understanding of Allen-Bradley controller functionality and parameterization.
Theoretical Knowledge Required
First-Order Systems in the Laplace Domain
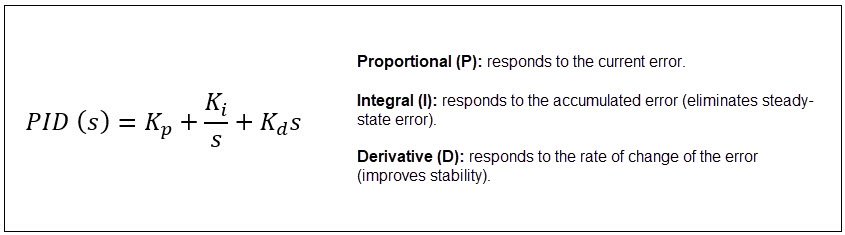
A typical first-order system has a transfer function of the form:
This type of system responds exponentially to a step input, without oscillations, and with a single time constant.
PID Controller
The PID controller consists of three components:
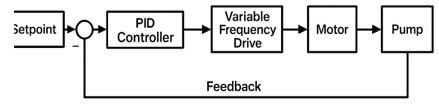
How the PID and First-Order System Interact
When a PID controller is connected to a first-order system, the goal is to modify the system's response to meet specific performance criteria, such as:
Faster response time
Reduced overshoot
Elimination of steady-state error
Step 3: Validate Functional Blocks and Understand their use
In the current example, a plant and its control system are emulated. The two key process variables are:
Pressure – Process Variable (e.g., managed via a pump) together with a control system led by the Allen-Bradley controller (ControlLogix) in addition to another device that works based on the next variable.
Frequency – Control Variable (e.g., managed via a variable frequency drive – VFD)
In summary, the system controls a pump using frequency adjustments from the drive to stabilize the pressure level.
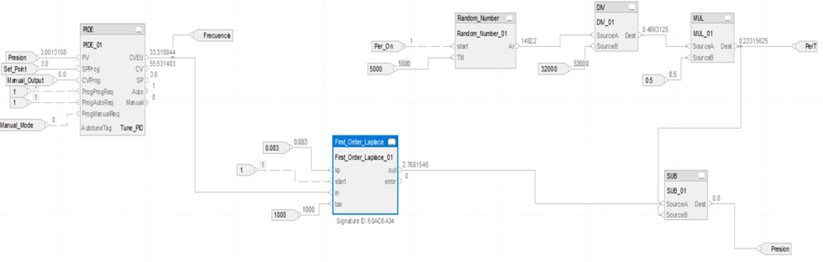
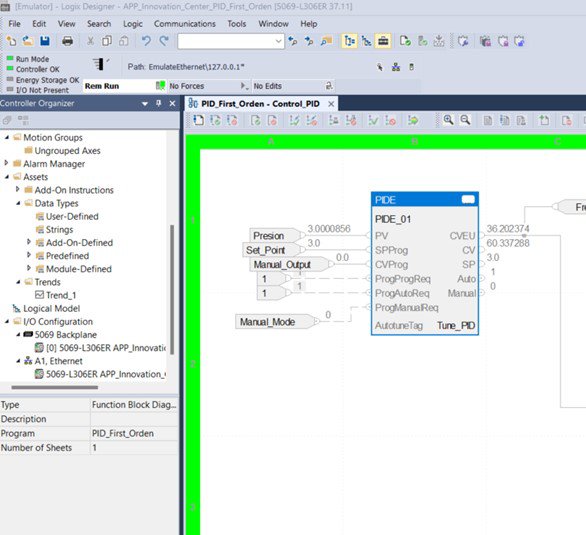
The program system consists of three fundamental parts:
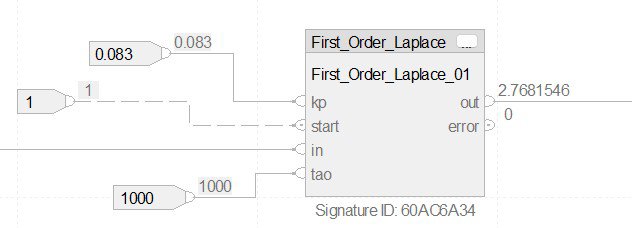
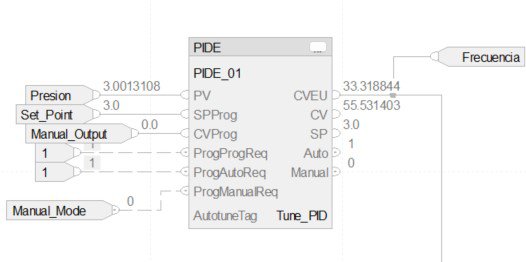
This block simulates the behavior of a first-order linear system in the Laplace domain, representing the pressure variable. It follows the equation described earlier in the documentation.
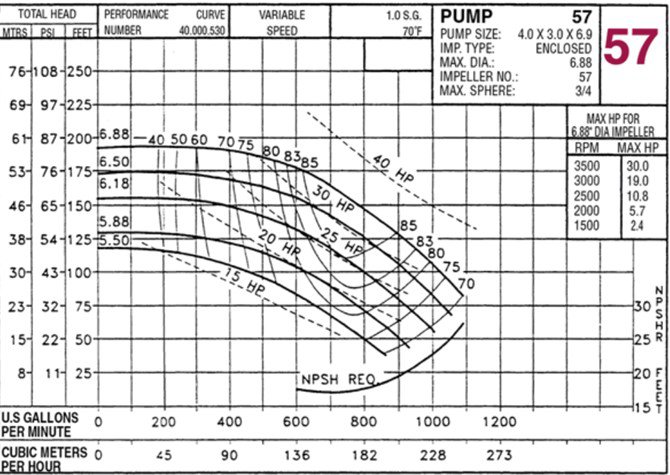
The variables shown in the graph must be defined in this block: the system’s static gain (Kp) and the time constant (τ) are based on previously estimated values.
For example, τ = 1000 ms corresponds to the approximate stabilization time of the first-order system. Functionally, we can estimate the system’s static gain:
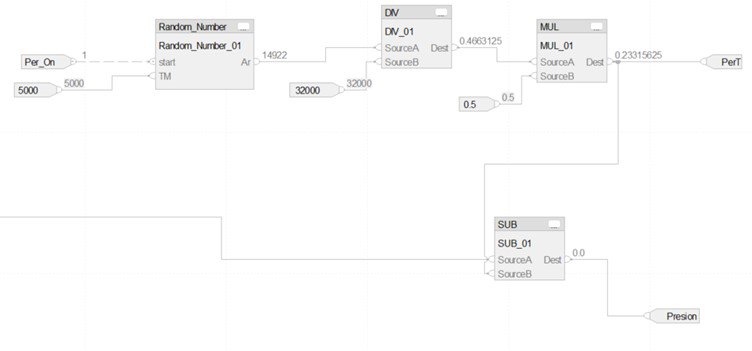
This segment includes several mathematical function blocks to simulate a disturbing environment.
In the diagram, four blocks are shown:
Random Number: Generates a random value from 0 to 32000 every 5 seconds, simulating periodic disturbances.
DIV and MUL: Convert the random value to a percentage and scale it to the defined maximum disturbance (e.g., 5 bar or 0.5).
SUB (Subtract): Represents the effect of the disturbance on the pressure output from the pump. The output of this block becomes the feedback signal that closes the loop and enters the PID controller.
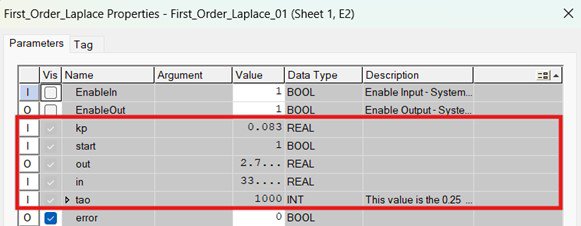
The first time the PID control block is used, it is necessary to perform the Autotune process (this procedure must be executed in Run Mode – controller), as it is essential for calculating the system gains (which have not been previously configured – in the image they were disabled for explanation purposes) and other parameters of the control block that will later operate in automatic mode (ProgProgReq=1).
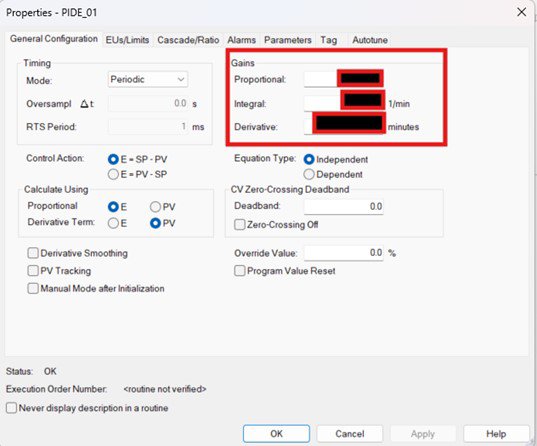
To initiate this, access the block’s properties (Properties – previous image) and begin selecting the appropriate settings according to the specific conditions of the application
The first relevant configuration is the Timing Mode (1), which should be set to periodic, as recommended, due to the nature of the task execution. Next is the Control Action (2); in this case, since the control behavior corresponds to a direct action, the first of the two available options should be selected. Finally, the last choice concerns how the process variable is calculated (3); the selected option corresponds to the typical configuration for this type of integral systems.
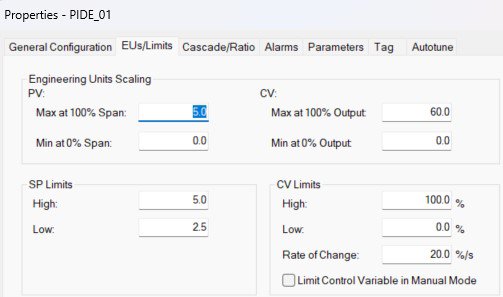
The next tab within the Properties window is EUs Limits, where the operating ranges of the system’s key variables must be defined: PV (Process Variable) – pressure in our case, and CV (Control Variable) – frequency in our case. According to the parameters previously mentioned in the documentation, the maximum pressure value is defined as 5 bar, and the maximum frequency value is 60 Hz. Subsequently, the limits for the control variable (CV) are configured, and the rate of change refers to the percentage of controller output segmented according to the defined step intervals
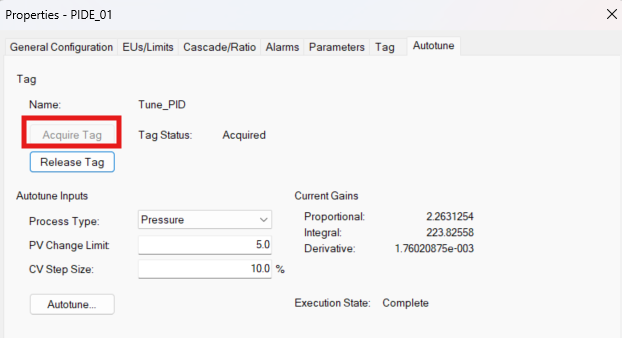
Finally, for the Autotune process, we navigate to the tab with the same name, where a Tag must be acquired (this is required when performing the process for the first time). Once the Tag is acquired, we proceed to define the Autotune inputs, starting with the variable type (Pressure), the maximum limit for the process variable change, and lastly, the size of the unit step increments that the control process will use.
To complete the gain calculation, we proceed by clicking the Autotune button. It is important to note that the PID module must be in Manual Mode for the Autotune to execute properly. Upon completion, the module must be switched to Auto Mode to begin operation, which is controlled via the Manual_Mode Tag.
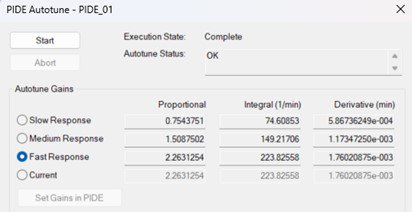
To calculate the gains, simply press the “Start” button. The program will compute the gains based on three response types (Slow, Medium, Fast), from which one must be selected according to the control system requirements. These gains are then applied to the control system using the “Set Gains in PIDE” button. The idea is that, by observing the graphical response displayed in Studio 5000, the user can identify which of the calculated gain response types is most suitable for the emulated system.
If additional information or functional explanations are required for the programming blocks used in the application program, the respective “Help” sections for each block can be consulted, such as the one shared in the “Links of Interest” section of this documentation.
As previously mentioned, to perform the final changes and adjustments (Autotune), the system must be operating in “Remote Run” mode within Studio 5000. Once this is set, the overall system will be fully operational, allowing for verification of the control system’s response to the entire structure that comprises it, including disturbances.
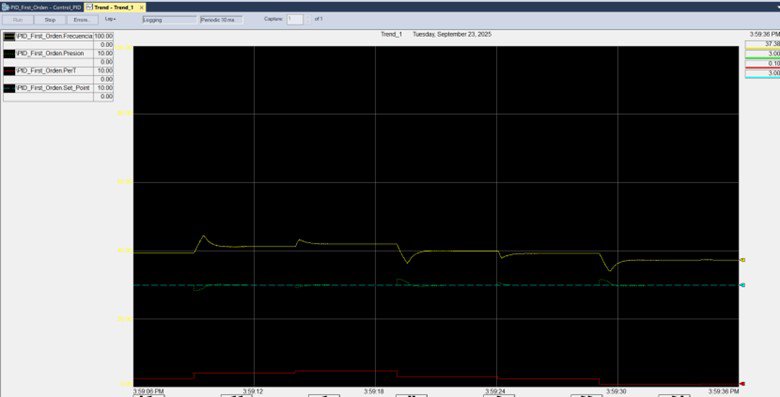
By executing the “Run” command, the system response can be visualized through a graph displaying the four most important curves: Yellow (Frequency), Green (Pressure), Red (Disturbances), and Blue (Controller-defined Set Point)
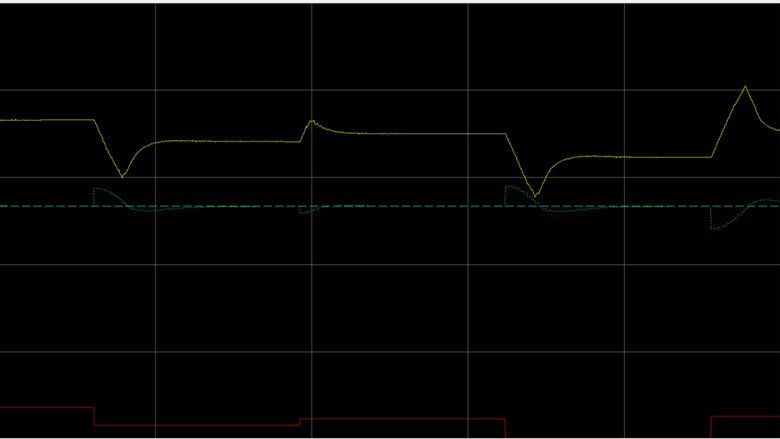
This graphical representation allows us to identify key behaviors of the system, enabling the emulation and analysis of the control process and its response to various scenarios that may arise. This is ideal for the intended purpose—creating test scenarios prior to implementation in the actual plant, allowing for adjustments and potentially significant improvements. In the highlighted area within the orange box, the graph focuses on a time period during which the system experiences disturbances. It shows how the “drive” adjusts the frequency to stabilize the system, and how the process variable, “pressure,” gradually aligns with the control target (set point – blue curve). Throughout the graphed time frame, we observe variations in disturbances and corresponding changes in each response curve, including adjustments, overshoots, and other typical behaviors of industrial systems with this type of variable—commonly modeled as first-order linear systems in the Laplace domain.
It is important to note that the example implemented in the application was designed to emulate a control process involving a pump, working in conjunction with a drive and motor as the control elements. However, the application is structured in such a way that, as explained earlier, it can emulate scenarios involving other industrial variables that behave similarly in first-order systems, such as Level, Temperature, Speed, etc. All necessary adjustments depending on the situation can be applied within the PID control block, as detailed throughout the documentation.
PID Control System Emulation for Industrial Variables
Versión 1.2 - Mayo de 2026
Subscribe!
Receive new app releases and other updates from the Innovation Center directly in your inbox.